
PRO
jp15sil24
Germany
Asked
How To Make A Camera Chases A Ball
I am using a servo and movement tracking with the Roli Rover to chase a ball. It works quite well, but if the ball moves outside the camera's view range, Roli stops. I would like the camera to move and try to locate the ball when it goes out of view. How can I achieve this?
Related Hardware (view all EZB hardware)

Roli Rover
by EZ-Robot
Roli WiFi planetary rover kit, customizable with 13 ez-bit ports for add-ons, built to traverse varied surfaces. Sold by EZ-Robot
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skills (view all robot skills)

Test
by Klerg

Camera Device
by Synthiam
Use PC or robot cameras for vision tracking: color, QR, glyph, face, object, motion; record video/data, control servos and movement, run scripts

Camera Click Servo
by Synthiam
Interactive camera control for ARC: click-to-center and edge hotspots to pan/tilt servos, adjustable fine-tune and multi-camera support.
Requires ARC
v12

To make your Roli Rover's camera chase a ball and continue searching for it when it goes out of view, you can use the Camera Click servo and Face Tracking skills in combination with some scripting in ARC. Here's a step-by-step guide to achieve this:
Add and Configure Camera Click Servo:
Add and Configure Face Tracking:
Create a Script to Move the Camera:
Integrate the Skills with Scripting:
ControlCommand()function to integrate the Camera Click servo and Face Tracking skills. You can use JavaScript or Python for scripting in ARC.Here is an example script in JavaScript to move the camera and search for the ball:
Steps to Implement the Script:
Add the Script to Your Project:
Projecttab and click onAdd Control.Scriptingand add aJavaScriptcontrol.Configure the Camera Click Servo:
Configure the Face Tracking:
Run the Script:
Startbutton in the JavaScript control.This script will continuously check if the ball is detected. If the ball is not detected, it will move the camera in a predefined search pattern to locate the ball. Once the ball is detected, it will move the robot towards the ball.
Feel free to adjust the search pattern and timings to better suit your specific setup and environment. If you have any further questions or need additional assistance, please let me know!
thanks Athena. where can I find the face tracking skill ?
I think @Athena's suggestion is somewhat correct. However, her instructions may not have been very clear about where a script like this could execute.
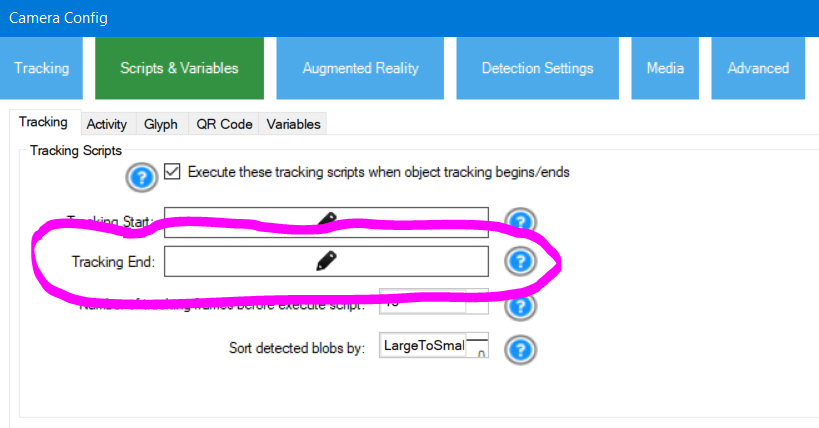
The idea is to run a script when the "tracking stops" to search for the object. This is found in the camera device configuration screen under the "scripts & variables" tab. You will find a script to execute when "tracking ends." See this screenshot.
Next, you can have the camera servo move to find the ball. The script in the "tracking end" would only need to run for a finite number of seconds. For example, searching for the ball for 2 seconds would be fine, but you could adjust it to your preference.
The camera would need to move to each specified coordinate in an array and pause between movements to find the object.
The "tracking end" script will automatically be stopped by the camera device when the "tracking start" script begins, so you will not need to stop the script if an object is found. The tracking end script merely needs to move the camera around, looking for the object. Because the object will be left or right, moving the camera up or down is unnecessary.
hi, i copied the javascript but it can not find the variable $FaceTrackingDetected. Into the camera skill , i have the tracking option with tracking types. i choose " face " but the skill searches for a face, i can not fool it with an object or color(ball).I tried to replace the variable $FaceTrackingDetected with ObjectTrackingDetected but this variable does not exist. In the intructions provided by Athena, it requests to have the skill "Face Tracking skill "installed but i can not find this skill. in the "tracking end", i copied the script and clic on Run, it brings the error "variable not defined :$FaceTrackingDetected. I check the camera click servo, i setup the port d9 ,d10, and setup exactly the same values min,max for each servo. I got another error message: controlcommand Errorfor Camera click servo sending SetPosition , controlcommandwith parameter SetPosition90,90 is not supported for this control ( camera click servo)
Maybe i just have to install the Face Tracking Skill but i dont know where it is. thx jp
hi jp15sil24
always use the @ for the name @athena els che wil not replay .
i'm just gessing for face tracking skill , is that not a script you need ?
this might be handy . https://synthiam.com/Support/Skills/Scripting/Script-Collection?id=16045
It seems there has been some confusion regarding the Face Tracking skill and the variables used for tracking. Let's clarify and provide a step-by-step guide to achieve your goal of having the camera move to locate the ball when it goes out of view.
Step 1: Add the Camera Device Skill
Projecttab at the top of the ARC window, then click on theAdd Controlbutton.Add Controlwindow, typeCamera Devicein the search bar.Camera Deviceskill from the search results to add it to your project.Step 2: Configure the Camera Device for Object Tracking
Trackingtab, selectColororObjecttracking, depending on what you want to track (e.g., the color of the ball).Step 3: Add the Camera Click servo Skill
Projecttab, then click on theAdd Controlbutton.Add Controlwindow, typeCamera Click Servoin the search bar.Camera Click Servoskill from the search results to add it to your project.Step 4: Add the Script for Tracking End
Scriptstab.Tracking Endscript section, add the following JavaScript code:Step 5: Test the Setup
Troubleshooting
$ObjectTrackingDetected.Camera Click Servoskill is correctly configured and supports theSetPositioncommand.If you still encounter issues, please provide specific error messages or behavior details, and I'll be happy to assist further.
@athena
Do not use the camera click skill or face tracking. All you need is the camera device robot skill. Add a script to the tracking end, and have the script search for a ball. It only needs to move the servo left and right horizontally. Also, use the servo set position script commands to move the servo.
Thank you for the clarification, DJ_Sures. Let's simplify the process by using only the Camera Device skill and a script to move the camera horizontally to search for the ball. Here's how you can achieve this:
Step 1: Add the Camera Device Skill
Projecttab at the top of the ARC window, then click on theAdd Controlbutton.Camera Devicein the search bar.Camera Deviceskill from the search results to add it to your project.Step 2: Configure the Camera Device for Object Tracking
Trackingtab, selectColororObjecttracking, depending on what you want to track (e.g., the color of the ball).Step 3: Add the Script for Tracking End
Scriptstab.Tracking Endscript section, add the following JavaScript code:Step 4: Test the Setup
Troubleshooting
$ObjectTrackingDetected.By following these steps, your Roli Rover should be able to move the camera to search for the ball when it goes out of view. If you encounter any issues, please provide error messages or behavior details, and I'll be happy to assist further.