Asked
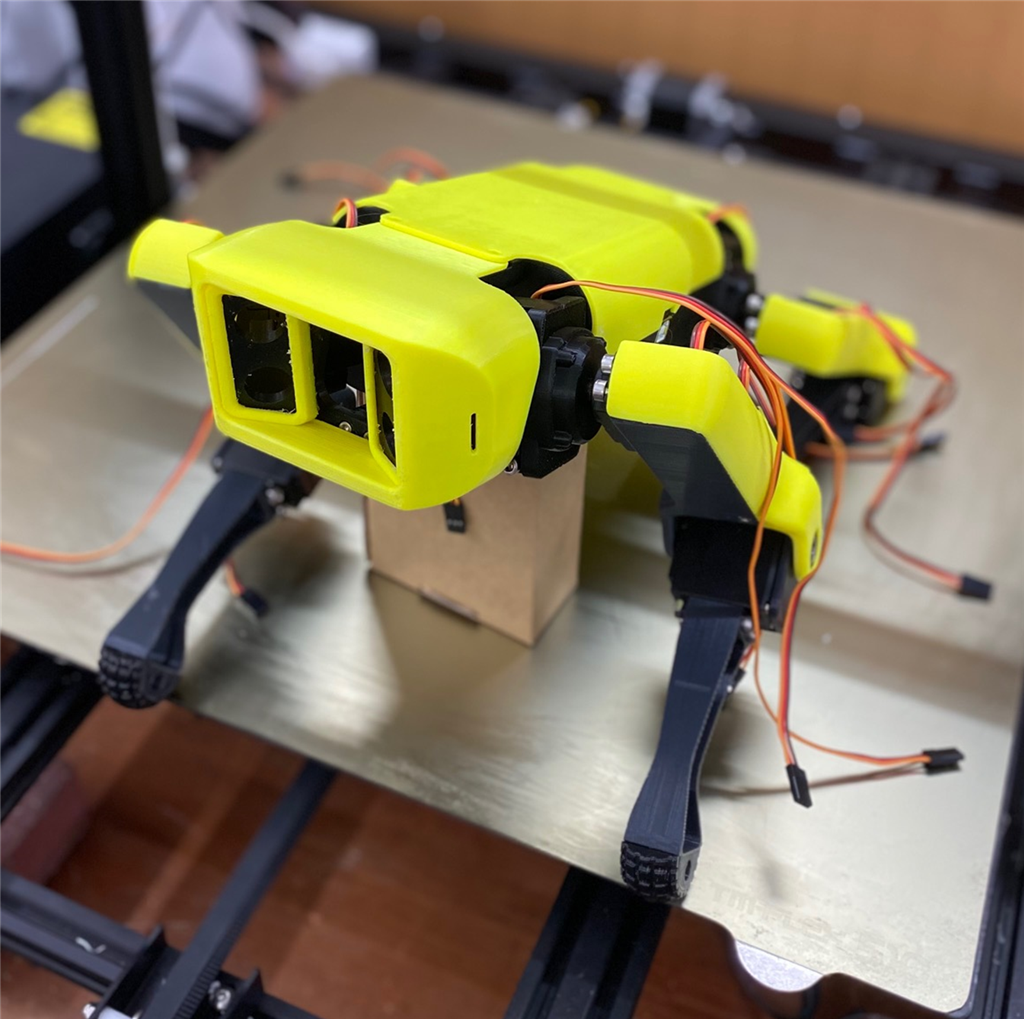
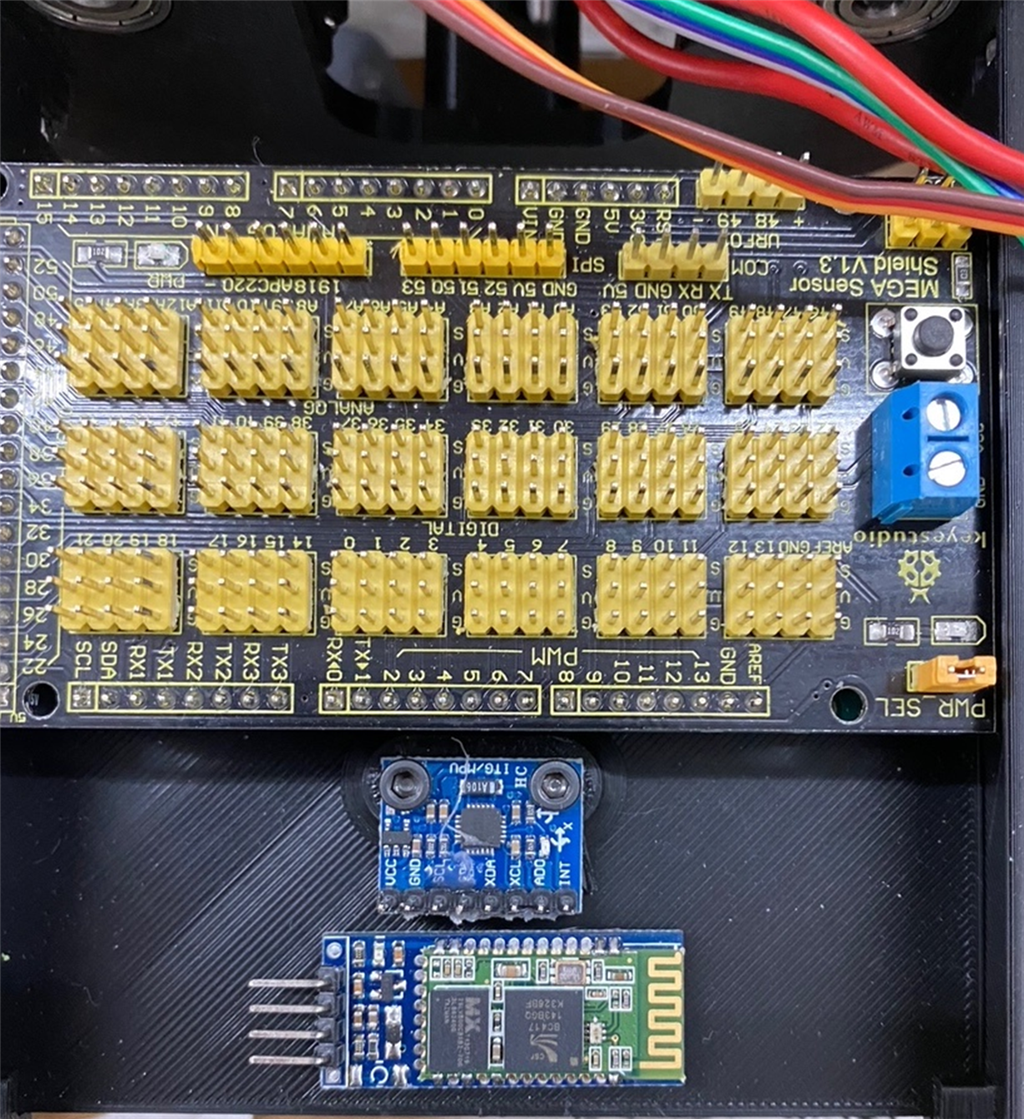
I have completed the mechanical assembly of Spot Micro. There are several versions for the controlling mechanisms used by various people. Here is a very cute one that is done with an Arduino Mega as the controller with embedded code in the Arduino. However, I have other options too such as either using a EZB V4 or a RPI with a servo Module and some reverse kinematics software.
If I decide to use the EZB V4, this is not that different than the "Six" robot in complexity (maybe). I have the parts and I am trying to determine which way to go. The kicker will be designing each step of movement with frames using ARC. I have not tried anything this complex control-wise.

Related Hardware Arduino Due/Mega

Is that little guy big enough to carry an EZB V4? Would an IoTiny fit better and have enough ports? You could also flash that Mega into an EZB.
EDIT: looks liek you need 12 servos. IoTiny only has 8 digital ports. Your mega would do the trick if you flashed it into an EZB.
One of the ideas is to use the ardunio with their code and control it from an ezb v4 or iotiny. This allows you to use their existing gait movements without making new ones.
Their arduino code would need a modification if it doesn’t accept serial commands to move directions. But I’m guessing it does. Do you have a link to their arduino source code?
JD, I like this idea. There are several sources. I don't know which is best to start with:
https://github.com/lulersoft/spotmicro-controller
https://github.com/MatthiasWM/SpotMicro
I will try to e-mail you the INO file for Max (Spot Micro) I also translated from Dutch.
Most are setup to use a gaming joystick connected via Bluetooth.
Looks like the first one is the best to use. It seems to accept serial commands for movements
Cool. I think I have another io tiny as well I could use instead of the EZB V4. Thanks for you help DJ!
I’ll take a better look at the code and see what the commands are
hi all
this guy is making one .maybe is something for you?
DJ, Did you have a chance to look at the Code to see how I/we can implement the hooks? Once I get this one done, I would like to offer it up as a spotlight for you. Any guidance or examples that you can provide would be great. It seems to me that what I want to do is have the ability to mimic the bluetooth connections and controls via the PS2 joystick via the IOtiny.
Also, I want to be able to read ultra sonic sensor data either from the Arduino/IO tiny. I would like to eventually integrate a camera too in the nose- that would be direct to the IO tiny. How do you connect the IO Tiny to the Arduino?
I will build a mobile screen app on top of it all using ARC.
DJ, Here is INO file for Max (Spot Micro) that I translated some comments from Dutch to English where needed. It appears this approach uses 4 analog inputs on the Arduino from a RC Controller receiver Output. I am wondering if one setup the IO Tiny to output 4 PWM signal outputs if it could simulate the RC receiver outputs and use the same code base in the Arduino Mega.
Looking at the code, your pwm idea would work fine. The ideal solution in the long term would be to modify that code for digital commands. But the pwm will work to get you up and running.
The code is pretty messy. Lots of spaghetti IF conditions that could have been grouped together. So modifying that kind of piecemeal code is difficult lol
EZB 4V is pretty compact when you take it out of the case you just need to solder power connector on it. I use them in a couple of robots this way.
DJ, I have wired an IO Tiny D0, D1,D2, and D3 to the Arduino A0,A1,A2, and A3 in each case - ground to ground, voltage to voltage and signal to signal on each channel This is a very rudimentary question. I have been trying to send a PWM signal from the IO Tiny to the Arduino on each channel to mimic the RC radio receiver output. Can you give me an example code snippet of how you would do it? I am not sure I know what I am doing.
Nink/DJ, I am seriously thinking about that next - booting the Arduino mega and just take my EZB V4 and use it. I would have to start all over with teaching the robot the walking gates - but that could be fun in the end.
I have included a photo of my attempt...
looks great.
Here is the code from my 19 DOF biped I used to make it walk.
oh yeah there isn’t any code because I used an EZB and a movement panel.
:)
Nink, Is your project code posted public ally on the cloud drive?
Make sure you have a GND connected between the two
You send PWM with the pwm command (i'm guessing you are using ezscript): https://synthiam.com/Support/ez-script-api/ezscript
DJ, I tried that. But the arduino code must have been misbehaving. Anyway, I booted the whole approach and moved right over the the EZBV4! Got the servo profiles setup and spot on his feet.
What tutorial do you recommend for using the frame approach for the servo motions?
the Auto Position manual is a good place to start
Looking at the code, all of the positions you need are in there. The value of 0 in their code would be 90 in arc. Because they use - negative values for one way and positive for the other
That arduino code also has an IMU connected. Do you have one on the i2c port? Maybe that's why it isn't working for you. I'm guessing they use it for helping balance and such. Probably a good idea to use their code and control it via pwm from the iotiny if you can. That way you can build off the work they've already done rather than reinventing it.
mstephens 42
I was looking at nallycat model, it inspired me.

Here is walking dogI was wondering if this project is still active. I am considering making something like this.
Please see my other comment in this in the other thread. If you are looking on ways to program this or your other quad, you may want to look here. Might find something with some research.
https://hackaday.io/list/29475-walkers
Happy New Year Perry. Thanks for the info. I will check it out. It looks like a lot info is available
Nice work! One of the teams at my club, AC Robotics is also making a mini 'Spot' called Canis.
It was a nice hot day in Toronto yesterday so I had a few beers on the deck.
woke up this morning and I found this on my work bench. A couple of JD’s had been sacrificed to the robot gods.
I guess I can clean it up and throw some code down.
Let’s call it JDog.
Hahaha oh my - those must have been good beers. I spit out my milk and laughed at that thing. Bet it walks great and is very stable. Just kinda caught me off guard