rgordon
USA
Asked
— Edited
Here is a basic top view of my robot drive chassis. For navigation purposes, is this layout enough for autonomous navigation? Do I need to arrange them differently or use a different type. I need it to be able to get around reliably and get through doorways easily.
Do certain types of I.R. sensors work better for navigation?
Thanks for any input on this matter.....
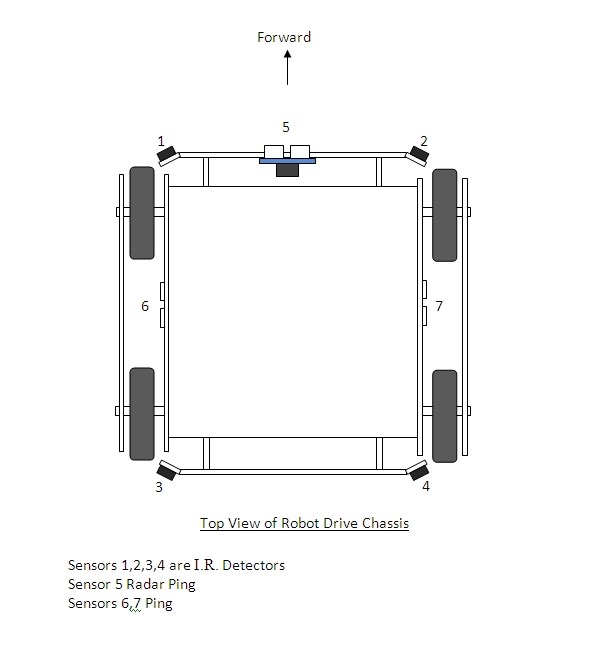

What do you think is the optimum angle for the corner I.R.'s? 45 degrees? So it will have the best view.
I could make the bumper so the corners could be adjusted, letting me experiment with the angle.
Mine will be whatever looks best on Melvin's base to be honest.
If you have them adjustable, you could always throw on a couple of mini servos and keep them adjustable, kind of like sweeping sensors but a smaller range.
Hmmm...adaptable sensor mounts to suit the situation....cool idea. Depending on the mode of travel or particular location the robot is traversing (hallway for example) one angle may be better than another.
I'm using double sided tape for the IR sensors , once I get the position where I want that works I will drill holes and poke the led sender and receiver through for a cleaner look.
For my main radar I used a pan tilt so it could have angle adjusted too. I figured the side and rear would just be fixed position. I know side sensors are not popular but its to avoid turning right into a object in the main radars blind spot.
Hey Jstarne i agree with your statement like IR sensors can be discovered almost everywhere. If you have a Pc mouse with a red LED or laser it is using IR mild.Thanks!
Sensors Manufacturers
REX you need both type of sensors sonar and IR,while back i made a tutorial on how to use IR and sonars and where to place them for good navigation
MOSTLY YOU PUT IR very low on your design to block sunlight
ON sonars to need to set them high or low ,but now where is will hit stuff like a sofa ON POSITION to detect corners of wall you need it vertical so that the cone is very small.
A very common design is one set (sonar and ir) in back ,another set on the side ,1 or 2 sets facing forward on a robot and 2 at 45 deg to detect corners
MOST guys call me a sensor expert because i have and used and tested almost everyone made.
Even test some so secret i can say anything about them
Josh,
How many Pings will you be using on Jarvis? Is there a limit on how many Pings you can use due to processor speed and performance issues? I am thinking Questor will end up with (8) Ping sensors.
On the front will be (3): -one down low to the floor -one midway up -one on the top deck.
On each side will be (1): total of (2) -just above the wheel section (for maneuvering in hallways and such)
On the rear will be (3): -one down low to the floor -one midway up -one on the top deck.
Of course I am still planning on using bumper switches as well.
To all who are following this thread, I would interested in everyone's input on this matter. Do you think I need more on the sides? Do you think I need IR sensors also? Or are the Pings enough?