rgordon
USA
Asked
— Edited
What Is The Best Layout For Navigation Sensors?
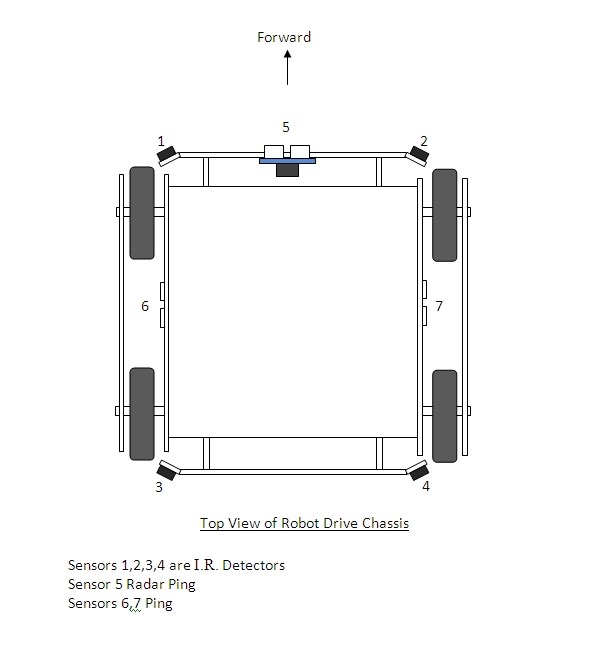
Here is a basic top view of my robot drive chassis. For navigation purposes, is this layout enough for autonomous navigation? Do I need to arrange them differently or use a different type. I need it to be able to get around reliably and get through doorways easily.
Do certain types of I.R. sensors work better for navigation?
Thanks for any input on this matter.....

From what I understand there are pros and cons of both IR and ultrasonic sensors. Personally, ultrasonic doesn't work for me in my house, I believe it's due to the materials and colours of my furniture. For this reason I use IR more than ultrasonic. However IR doesn't like daylight.
Position wise, I plan to use IR sensors in positions 1 and 2 on your diagram and also a third IR above the front ultrasonic, plus the ultrasonic too. Noting around the back or sides (it can't move sideways so it shouldn't be a problem there), although a rear sensor could be useful when reversing.
It comes down to how many sensors you want and how many ports you have to play with. If you have 6 spare digital ports then 3 ultrasonic sensors could be useful. The same for IR. Just always take in to consideration the benchmark, mine can do around 25 reads per second
I think with all these sensors have covered all angles for navigation, but if you already have two IR sensors on the front at 45 and also the sides with sensors ping, it may not be necessary radar ping, this front sensor could be fixed either ping or IR. Sometimes the robot approaches a wall laterally as it moves forward because its trajectory is not parallel to the wall next to him. Side sensors are very useful for this case, as the front fixed sensor would not detect the sidewall. I think that is a mainstay in robotic capacity accurately move our home robots and certainly hope that together we will succeed.
The rear sensors do not see the point if we want the robot to navigate forward, if you are in a dead end can be rotated 180 degrees and navigate forward again without turn back. If in any case requires the reverse gear will install a fixed sensor at the rear center to simplify the system. I made a modification of your drawing to show what would be my ideal platform for navigation (in theory, since I have not proven) No what would my rate readings per second but I would like to try some seven IR sensors in this configuration:
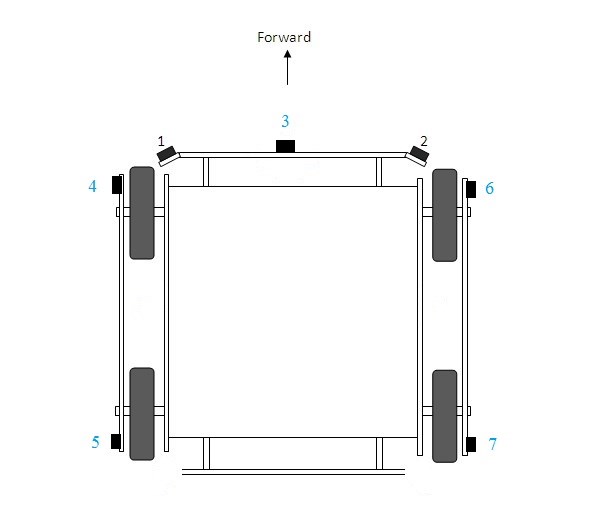
IR would use two sensors on each side of the robot (4 total) for comparing the readings from both sensors on one side and correct the trajectory to be parallel to the side wall (such as in a hallway) There was talk in other threads about sailing comparing readings to circulate side by always geometric center of the hall but slightly serious career as "S" or "Z". With the four side sensors can navigate in the center of the corridor and parallel to the side walls.Yeah with all the stuff I'm planning I'll bet I'll have to get a second EZ-B. Maybe put one EZ-B just in charge of the sensors.
I still like the idea of using sensors on the sides to help keep it centered when traveling down hallways and such. Would I.R. 's work better for this than Pings?
Thanks guys for replying with your ideas.
It all depends on the surroundings from what I've read. I have black furniture which ultra sonic doesn't like (apparently) so I prefer IR.
The 2 IR sensors on the front corners should help centre it on a hallway in theory, that's all I plan to do on Melvin but the proof will be in the testing I guess.
I've learned from the Roomba and Scooba robots that the IR cliff sensors don't like flat black and other dark colors due to the IR signal not being reflected back to the receiver.
RGORDON i hope to have some sensor data up soon on all types of sensors,i got in my optical bench and making some attachments for each type of sensors.
This is how I plan to have Melvin's sensors
Then, basically... If the ir sensor on the left detects something it'll turn right. If the ir sensor on the right detects something it'll turn left. If the ir or ping sensor in the middle detects something it checks left & right. Much like my ping roam script but without sweeping. If boxed in, or too close to an object the whole robot will turn rather than the sweep servo.
So far running on just the front IR he has avoided most things.
Also, with the 2 corner sensors, I'll probably have them centre up the robot in a hallway. If left ir is greater than right ir then the right hand wheels will slow down, causing him to veer off to the right slowly, until the two levels match. The same for the other side.