
rgordon
USA
Asked
— Edited
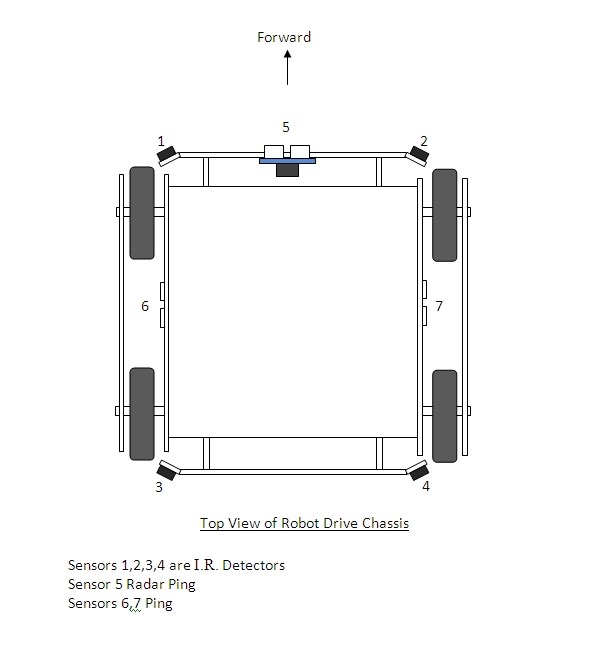
Here is a basic top view of my robot drive chassis. For navigation purposes, is this layout enough for autonomous navigation? Do I need to arrange them differently or use a different type. I need it to be able to get around reliably and get through doorways easily.
Do certain types of I.R. sensors work better for navigation?
Thanks for any input on this matter.....

REX you dont need sonars near the floor ,but for that is always IR ,look at roomba robot and neato xv11 all use IR Second do need IR ,SINCE SONAR wont detect most stuff and same with IR,GLASS;SHINY STUFF,SUNLIGHT
I am looking at changing the IR frequency design to see if it will do better in sunlight
There is a limit on the data transfer between EZ-B and PC. Run a benchmark to find out what yours is since they will all differ slightly.
Real world example, mine...
15 reads per second. That would be just under 2 reads per second for 8 sensors, with nothing else happening.
Writing shows a lot more
Do a benchmark first and work out where the limits are. If you use multiple EZ-Bs you will probably find it's better to spread the sensors over them all rather than have one board for sensors and one for servos etc.
IF you look at my lynxmotion johnny five design it uses 7 sonars and 7 IR'S AND 2 more IRS for floor detect.
A very well made design.
It is my understanding that the L and R ultrasonic or IR sensors should be placed L pointed to the right and right pointed to the left. That way everything is covered. I tried it , and it worked GREAT.
just my 2 Cents.
@josh What exactly do you mean "once I get the position where I want that works I will drill holes and poke the led sender and receiver through for a cleaner look." How do you do this?
I have experienced that my Ping units will bog down and slow down the robot if I use more than one. Maybe multi-EZBs.