Asked
— Edited
i get an error trying to use the ping sensor.something about matrix is not good.
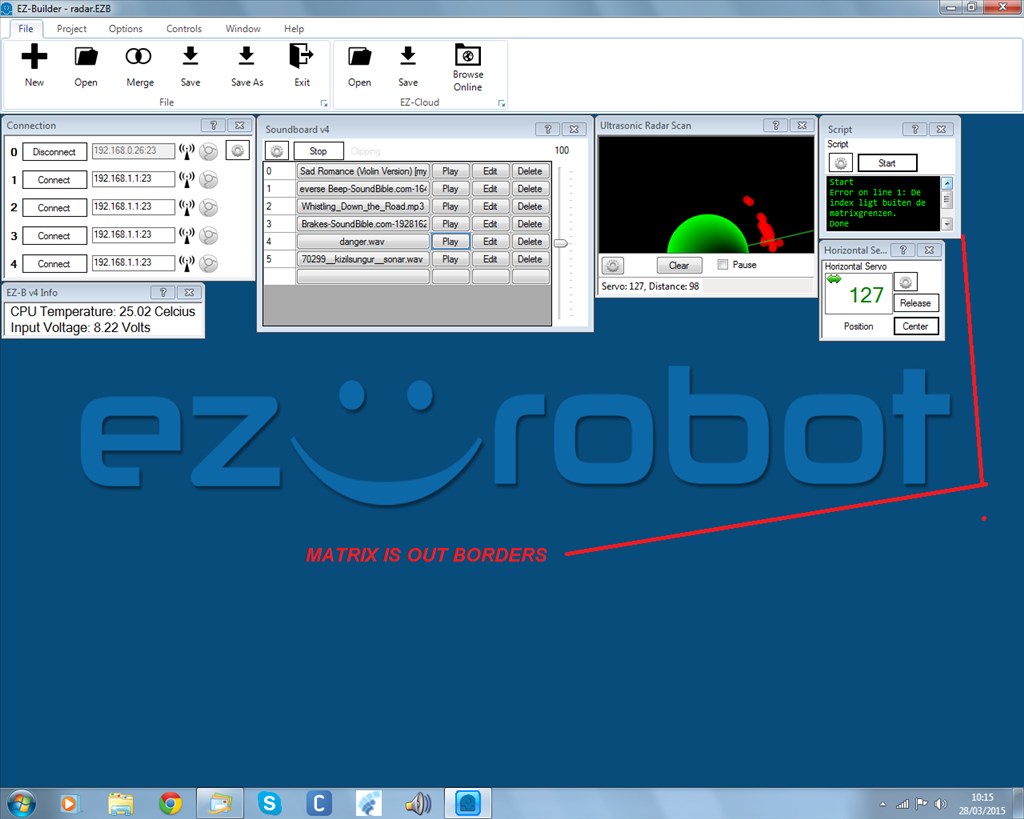
and the text is in nederlands written
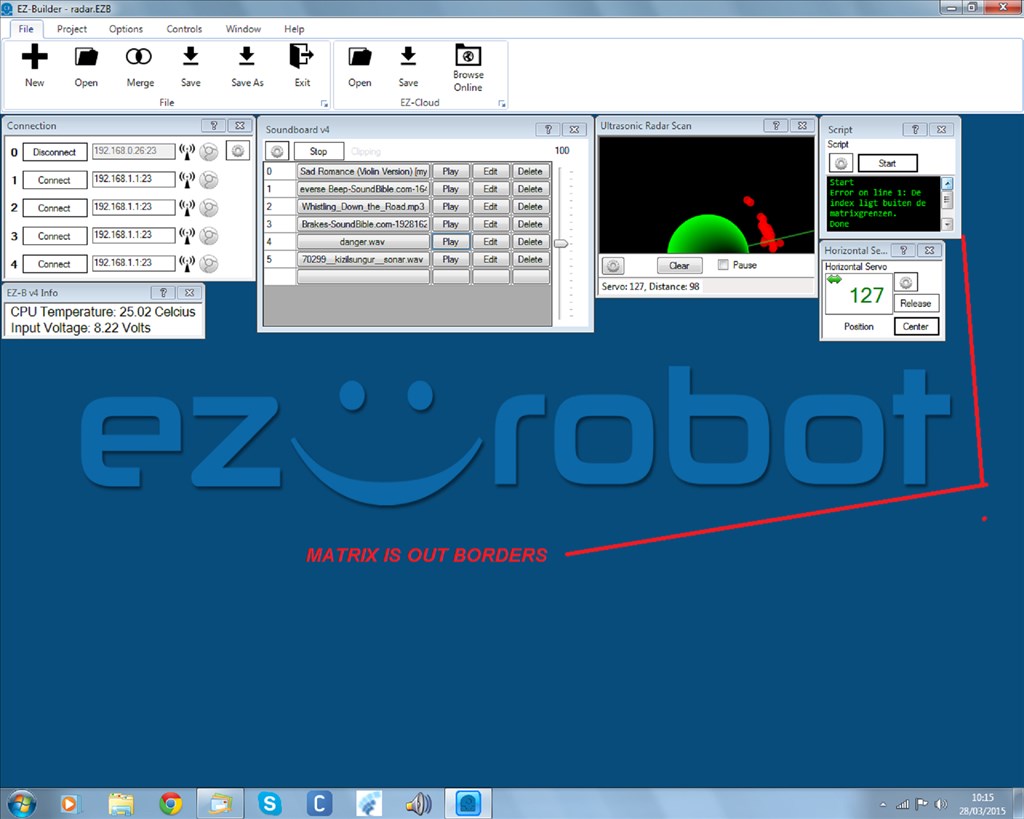
bigger pic
 Bing Speech Recognition
— Accurate Bing cloud speech-to-text for ARC: wake-word, programmable control, $BingSpeech output, Windows language support, headset compatible
Try it →
Bing Speech Recognition
— Accurate Bing cloud speech-to-text for ARC: wake-word, programmable control, $BingSpeech output, Windows language support, headset compatible
Try it →
i get an error trying to use the ping sensor.something about matrix is not good.
and the text is in nederlands written
bigger pic

Is the RepeatUntil() what Richard uses to exit a script?
You can exit a script with HALT()
@Rich For obvious reasons I use an impossible statement to have the repeatuntil loop repeat forever... When I first stated using ez robot about a year and a half ago, I did use goto loops instead of repeatuntil... However, it might be just with the ezb3 (because this is what I was using) after a minute or two in a goto loop the ping would fail to fire. With a sleep set at 100 between checks, the ping would just stop working for some reason... I replaced my "read ping goto loops" with a repeatuntil loops and it immediately fixed the ping/firing problem...
To be honest I feel the repeatuntil statement is just a better way to do infinite loops. Goto statements are more meant to jump from place to place in your code...
@nomad.... Try this and let me know if it does what you want... I had to fix my if statement... forgot the brackets...
@nomad... Try this one too... see what works better...
rr goodmorning
danger danger danger is track-4 actully sonar is track-5
it did nothing just lot off heavy noise this is what i want to have.
first ping goes left and right whithout detect any and play sound file (sonar)
then when he spot something stand still and play danger danger danger. when the object leaves he goes back to left and right whit sonar sound.
@nomad... Play with this one to see if you can get it to work the way you want...
rr the previous one stops rotating and disconnects the ezbv4
Which script? What post #?
How long are those sound files 4 and 5 when you play them on their own? 1,2 or more seconds long?
Take out the ControlCommand("Soundboard v4", Stop commands and see if it still disconnects... Make sure you battery is good as well... a weak battery would cause your ezb to disconnect while moving or attempting to move servos...