Asked
— Edited
What Is Matrix?
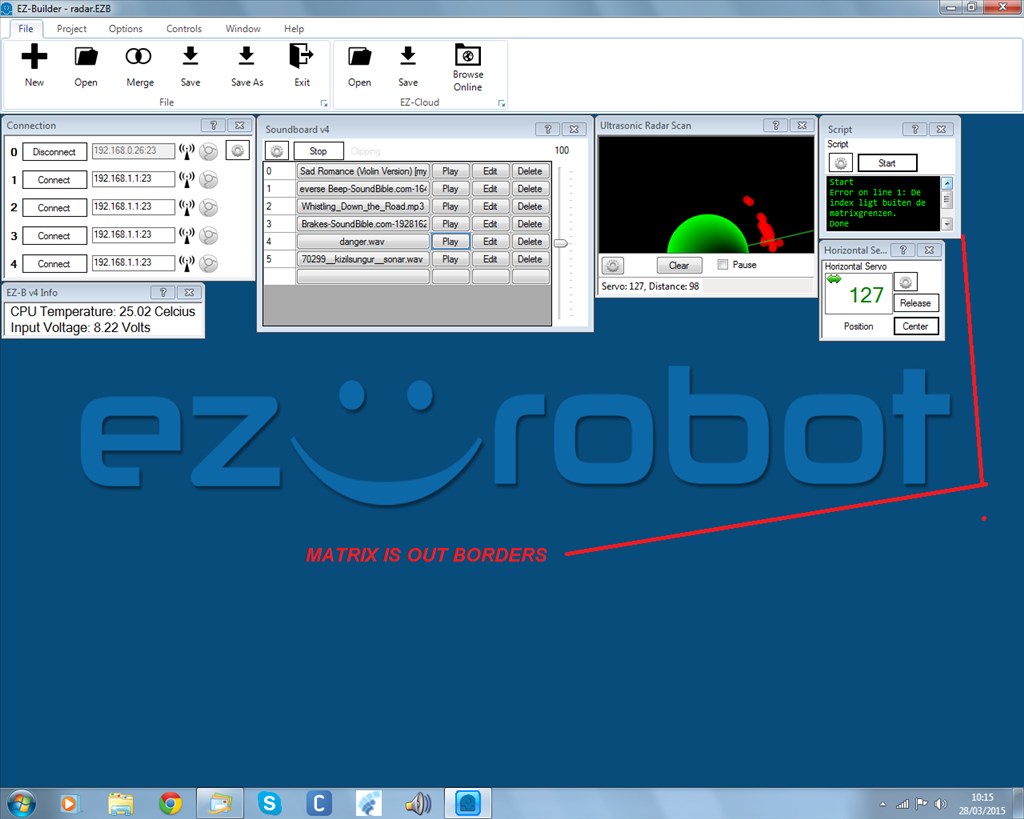
i get an error trying to use the ping sensor.something about matrix is not good.
and the text is in nederlands written
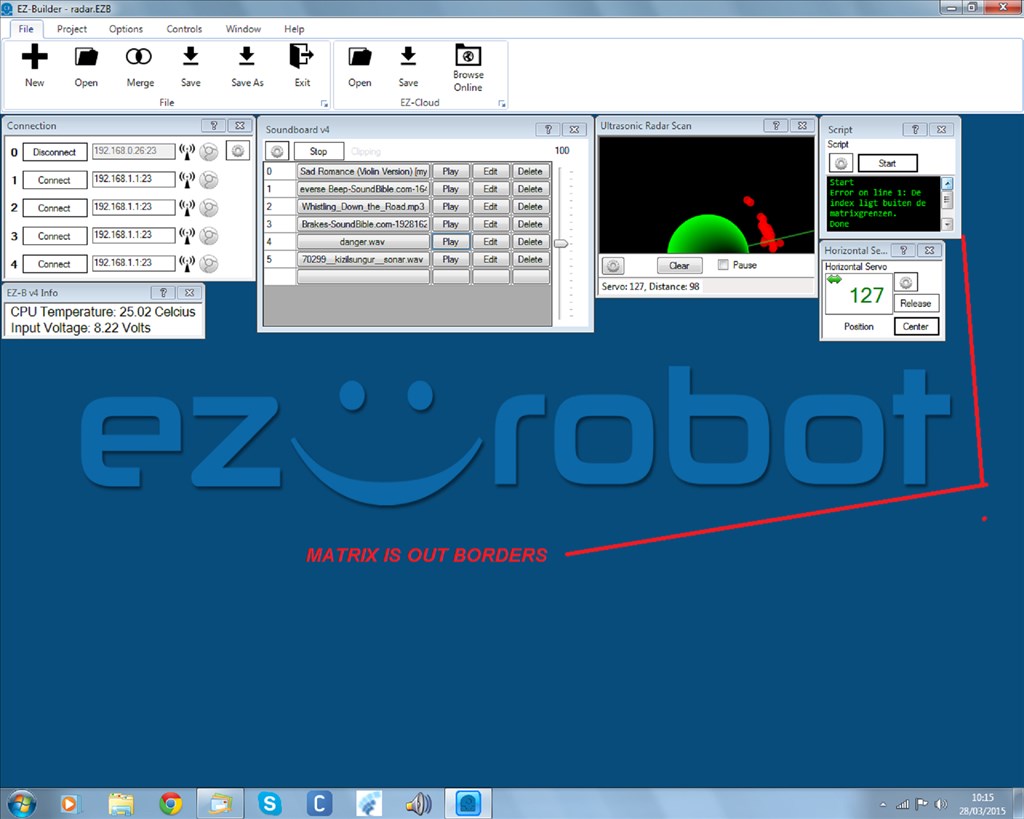
bigger pic
 UBTECH Alpha Servos UBT-12HC
— Control UBTECH Alpha UBT-12HC smart servos via ARC using EZ-B v4/IoTiny UART, assign virtual ports, set baud, custom bits and position mapping.
Try it →
UBTECH Alpha Servos UBT-12HC
— Control UBTECH Alpha UBT-12HC smart servos via ARC using EZ-B v4/IoTiny UART, assign virtual ports, set baud, custom bits and position mapping.
Try it →
i get an error trying to use the ping sensor.something about matrix is not good.
and the text is in nederlands written
bigger pic

The index light outside the matrix boundaries
@nomad.
Can you post the script that has the error so we can have a look.
steve g
i forgot how to do that,
Select the script code, press CTRL and C together to copy it, and paste it on the forum thread inbetween the "Code" tags.
ok i try
ctrl+c and press copie to clipboard? paste is ctrl+v ?
@Nomad Open your script in ARC, highlight it all with your mouse, copy it... then come here and paste it into your post.... done
@Nomad you can also just give us a screen shot of your script...
You can also copy and paste by right clicking on your mouse