
GregWW
USA
Asked
— Edited
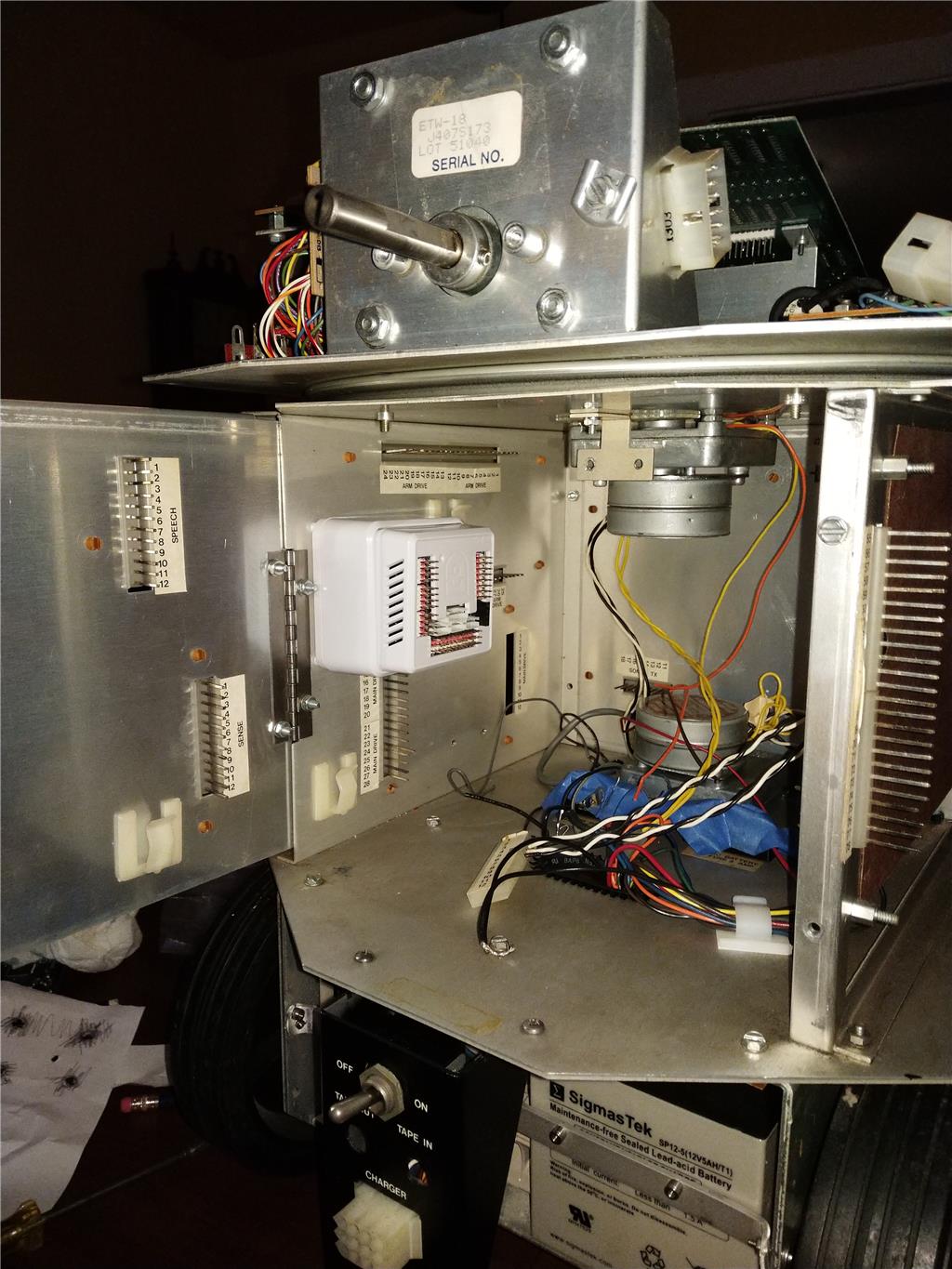
Good Afternoon Community! I'm making slow but steady progress on rebuilding my Hero-1. I have a question:
Has anyone run in to issues mounting a EZ-B4 vertically?
See the attached photo.
I've looked at all the EZ robots...all are horizontally mounted. From what I can see, the power connector and the magnets are the only "things" holding the processor in the base. I'll have to come up with a way to secure the processor in the base so it doesn't vibrate out.
-Greg
Ok...Let's try this again https://www.ez-robot.com/emicons/emo_smile.gif


{kind=link}
I'm thinking the difference is "lose of power" in the ezb vs "lose of comms" in the discussion. It would stand to reason that the that EZB might do as you recall from an old thread (I recall it too) that the ports go low if the EZB loses comms and I would view that as loss of wi-fi, but the robot and EZB is still powered. So the robot should just relax and stop in a revolution robot (a comm going LOW could be something else in a custom robot).
But if you lost power or the EZB fell out of the robot I would tend to think there is nothing to pull the comms low and they would float.
That is what I think - not tested. Now I want to test it.
@Justin, wouldn't loss of power, by defenition be low (0 volts)? I think that is the easy one, but comm loss is the tricky one.
@GregWW, yes, I think it is that simple. If you connect to a relay, don't even need a different logic device to monitor. Pin goes low, relay disconnects power to the drive wheels.
Alan
Hi Greg,
I mount the controllers vertically all the time in my large scale robots. I remove the top cover of the power shell and carefully mark and drill 1/8" holes though the plastic shell at the location of the 4 board mounting holes. Four 4-40 x 2.5" screws and locknuts secure the power shell to a vertical panel. Here's an example from my latest ARMadeus Mk. 12 robot.
Or if you're worried about the EZB coming loose from the powershell........... you could just trash the power shell, cut a hole EZB's plastic shell for wires to pass through (or get rid if this shell also), unsolder the Deans power pin and solder a pigtail to the EZB's power input points where the Deans pin used to be. Install a Molex connector on the pigtail for easy disconnection. Don't forget to install an inline 20 amp fuse on the positive leg. Problem solved and you have less bulk and a better power connection. I have 4 EZB's in my robot and have tossed all the power shells. In my opinion the power shell is Just another unnecessary component in a DIY robot that adds an unreliable power connection and complexity.
Wow, thanks guys for the great ideas. So Dave, you got rid of the funky Deans connector all together. I thought of that, but this is my first Bot and I wanted to see how well the base performed. -Greg
My problem is with Sabretooth. When I send a command it keeps going until I send a stop command. So if I loose communication it keeps on going. I am not sure that there is a way to stop it.
With the relay idea, you could just cut power to the Sabertooth, or even the drive wheels.
Alan
Which model sabertooth are you using and are you using it in r/c or serial command mode? On most models when in r/c mode there is a dip switch setting to enable a Timeout Failsafe, which will shut down the motors if the Sabertooth stops receiving correct signals from the receiver. If using Packetized Serial mode, you can send a command to enable the timeout failsafe.