
GregWW
USA
Asked
— Edited
Good Afternoon Community! I'm making slow but steady progress on rebuilding my Hero-1. I have a question:
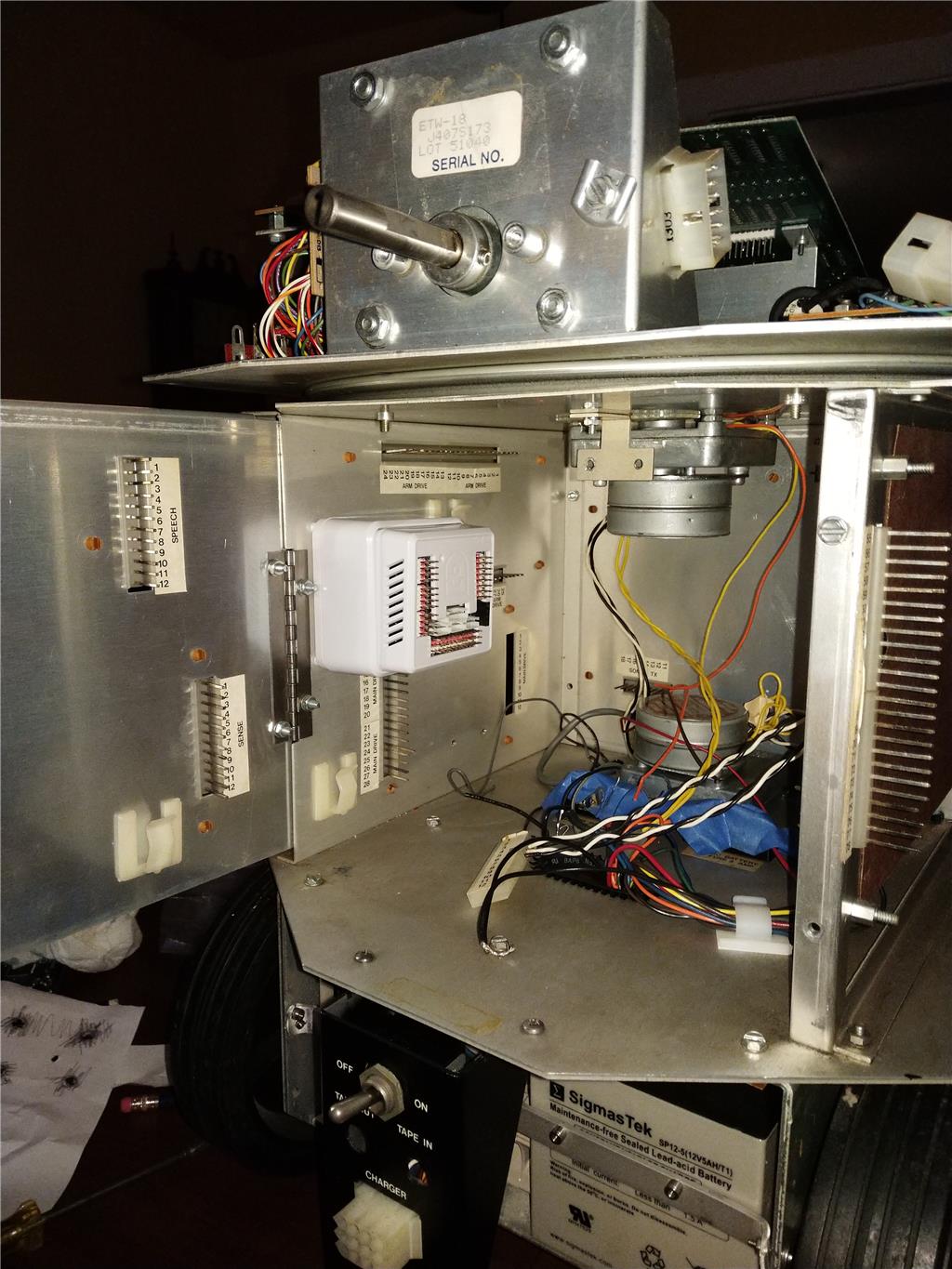
Has anyone run in to issues mounting a EZ-B4 vertically?
See the attached photo.
I've looked at all the EZ robots...all are horizontally mounted. From what I can see, the power connector and the magnets are the only "things" holding the processor in the base. I'll have to come up with a way to secure the processor in the base so it doesn't vibrate out.
-Greg
Ok...Let's try this again https://www.ez-robot.com/emicons/emo_smile.gif


{kind=link}
Ok Figured out how up load video of "Shake Test"
@Justin, Just a quick thought, use the power from one of the servo power pins to power a relay. The relay when engaged passes power to the rest of the robot. If the EZB comes off the base the relay disengages and no power to the bot.
Yep... that's one way of handling it. -Greg
My electronics knowledge is limited, but I think when this has been discussed before the conclusion was that you also need a pull down resister to the relay. That way if the EZ-B loses communication but still has power, and the pins float, the signal will be pulled low and release the relay.
Someone please correct me if I have this mixed up.
Alan
Anybody do this?
Is there a bit from the EZB that will toggle in a "loss of comms" event? That way external hardware could trigger an alarm and do a graceful shutdown -Greg
I have been searching (unsuccessfully because I can't seem to properly narrow down the search terms) for previous discussions about this. I did find a post from DJ that says all ports will go low when the EZ-B loses connection, but I have definitely seen other discussions where ports floated and might not be seen as low by a connected device. Not sure what the actual current status is since most of those conversations predate the V4/2.
Perhaps some experimentation is called for... Empirical data always beats documentation anyway.
Alan
I agree with you Alan. If it's true that all ports go low or float with a comm loss...then you could set a bit with a pull-down on it, high while running. Monitor the bit externally and trigger an alarm when low...is it that easy or am I missing something? Greg