
GregWW
USA
Asked
— Edited
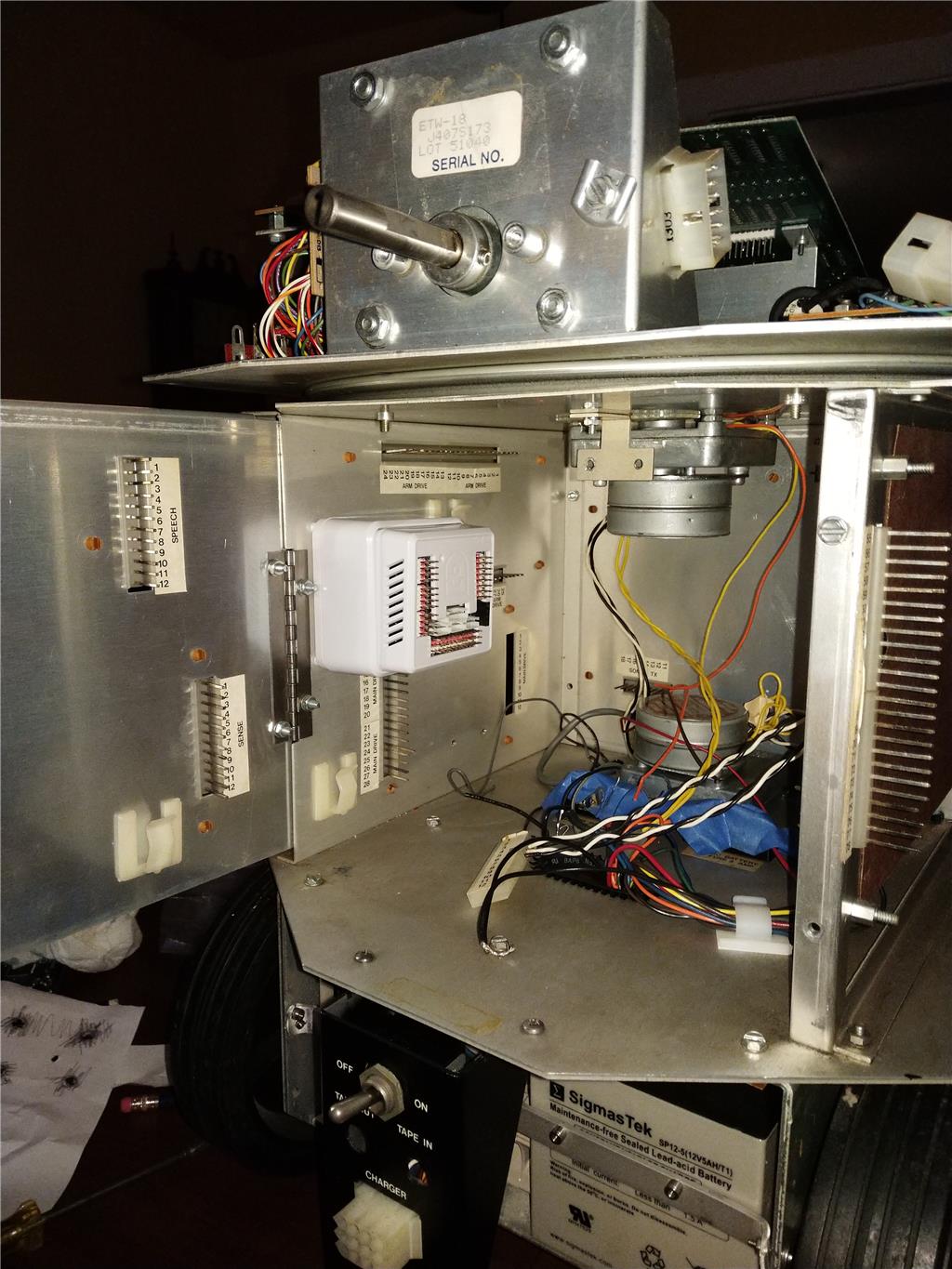
Good Afternoon Community! I'm making slow but steady progress on rebuilding my Hero-1. I have a question:
Has anyone run in to issues mounting a EZ-B4 vertically?
See the attached photo.
I've looked at all the EZ robots...all are horizontally mounted. From what I can see, the power connector and the magnets are the only "things" holding the processor in the base. I'll have to come up with a way to secure the processor in the base so it doesn't vibrate out.
-Greg
Ok...Let's try this again https://www.ez-robot.com/emicons/emo_smile.gif


{kind=link}
Hi Dan,
I will look but I believe serial from EZ. Also having a hard time with speed control. Nothing seems to work. It is InMoov so I want him to creep slowly around.
another quick thought. Write an EZ-Script that sets an analog pin high then back low at a given rate. Using a 555 timer setup as a monostable multivibrator use the output to drive the relay. As long as the script continues to refresh the analog ping the relay stays engaged. If you lose communication the refresh does not happen and the relay disengages.
And if you lose power, again the refresh would not happen and you again disengage the relay
After reading thru the rest on the posts, if the EZB does go high impedance when comm is lost, then you can drive the relay form a analog pin with a pull down resister.
No.
I did a simple test: LED connected to a digital port. Mobile Application toggles the EZB digital Port. If you switch off the mobile wifi, EZB keeps the port state On or Off.
Thanks ptp, so the EZ solution is out.
Sabertooth:
The 2x25V2 (2012) https://www.dimensionengineering.com/datasheets/Sabertooth2x25v2.pdf
Has the Timeout Failsafe for RC and MicroController Mode
The 2x25V2 (2007) https://www.dimensionengineering.com/datasheets/Sabertooth2x25.pdf
Does not have the Timeout Failsafe, but supports an Emergency Stop switch (Active-Low). If you pull the S2 Input to Low the Sabertooth shutdowns.
Basically is an Emergency Stop Button but can be driven by a circuit logic to stop when a communication is lost.
I don't have time to test this out today, but has anyone tried:
in their EZ-Script?
If the test fails, you still can not communicate with the EZB to tell it to halt the motors.