
GregWW
USA
Asked
— Edited
Vertical Mounting Of Ez-B4, Hero-1 Reboot
Good Afternoon Community! I'm making slow but steady progress on rebuilding my Hero-1. I have a question:
Has anyone run in to issues mounting a EZ-B4 vertically?
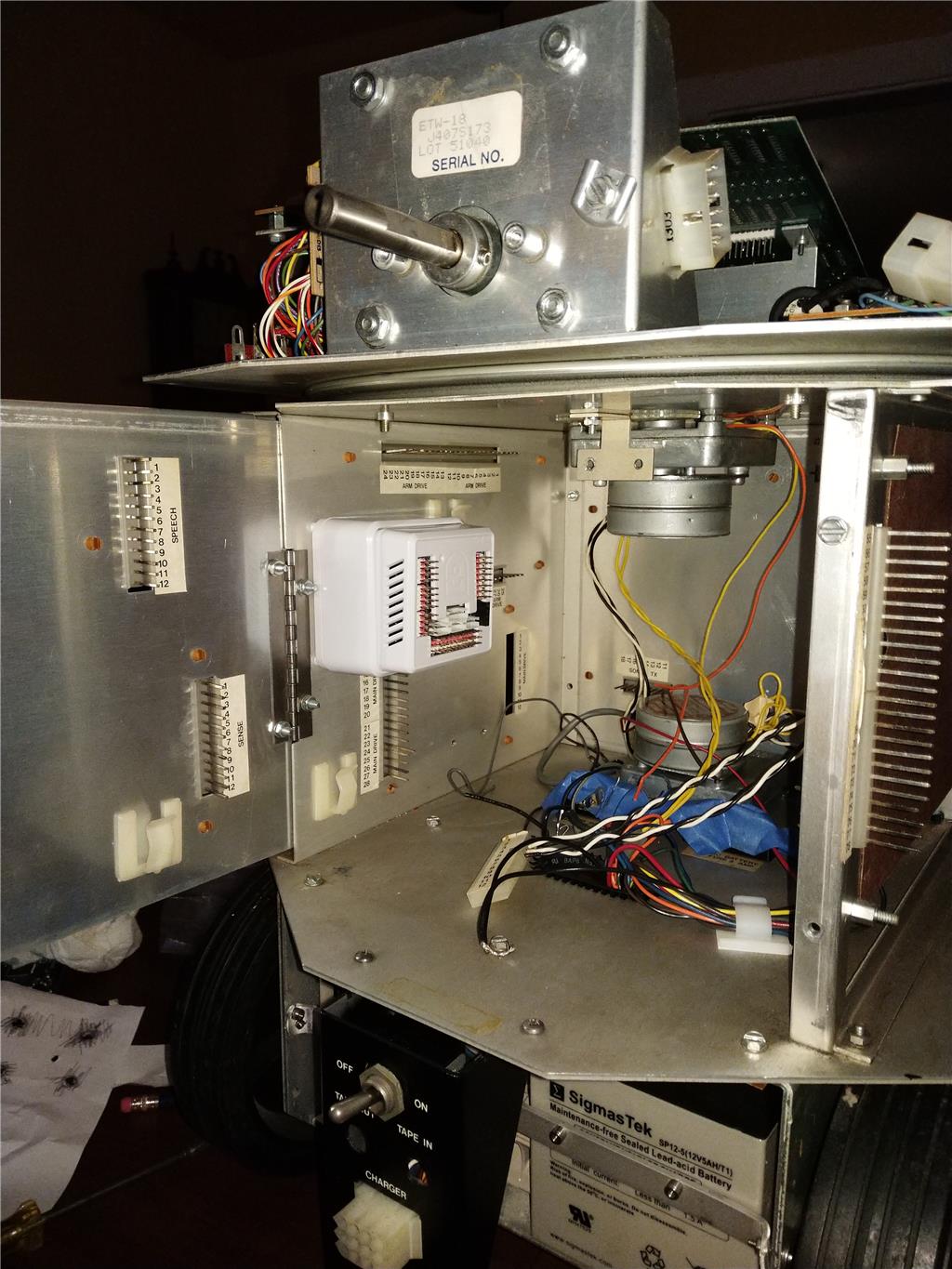
See the attached photo.
I've looked at all the EZ robots...all are horizontally mounted. From what I can see, the power connector and the magnets are the only "things" holding the processor in the base. I'll have to come up with a way to secure the processor in the base so it doesn't vibrate out.
-Greg
Ok...Let's try this again https://www.ez-robot.com/emicons/emo_smile.gif


{kind=link}
Hi Greg!
It seems that somehow the picture didn't get attached.
I've mounted an EZ-B vertically in my 18" R2D2 I just used some good ol' hot glue with the Power base.
Thanks Jermie Photo now up loaded.... So you didn't hold processor module in the Power base. It never "wiggled" out while the robot was moving? -Greg
That's a nice photo! Pretty awesome that you are converting the Hero-1 to use an EZ-B!
I've never had it wiggle out but if you're a bit fearful of it happening you could always place a bit of hot glue around the legs of the EZ-B enclosure and quickly mount it back in the power base. If you ever make a mistake, spray a little isopropyl alcohol on the affected area and the hot glue will easily release . It's a little trick someone taught me some years ago.
. It's a little trick someone taught me some years ago.
Thanks Jermie That's a neat trick! In my head, I had some kind of "rubber band gizmo" that would hold the module in the base. I was wondering if anyone had come up with a wiz-bang way of holding in the base.
Thanks Greg
Come to think of it, I've not sure how old your ez-b/power base are but if they are fairly new the installed magnets should be sufficient to hold the ez-b in place. The magnets are there for that very case. The ez-b is mounted vertically in JD.
If it is older and doesn't have the magnets, you can also just run a strip of tape around the edge of the base and the EZ-B to hold it in.
Alan
Alan: I tried your idea last night.... It totally worked! I used 4 pieces of electrical tape around the lower edge of the power base. See the attached pic.
I did a shake test afterwards... the processor module is stoutly held by the power base. I took a video the of the shake test, but I haven't figured out how to upload an MP3 file yet....("add YouTube Video" only loads a URL ?)
Thank you Alan -Greg
You'd probably want to create a YouTube account if you don't have one yet and upload your video there, then you'll have a link to your video and you can share it.