
mbrooks
Australia
Asked
Using Stepper Motors With ARC
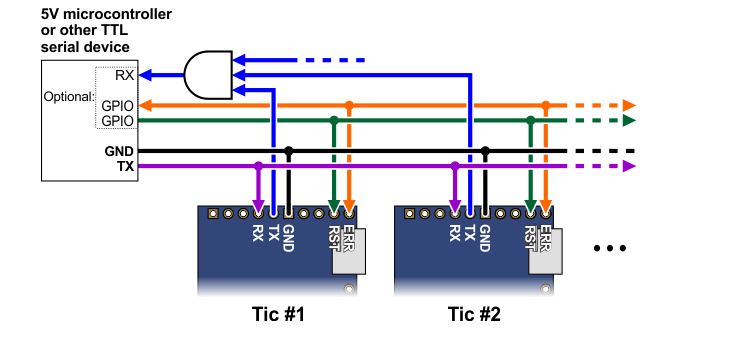
Hi .. I am new to ARC platform. I have successfully created a project and exercised servos. I know I can add DC motors via the Sabertooth controller .. my issue is that I would like to use Stepper motors (using a single Ez-b channel per stepper) .. I use the Pololu Tic T500 'smart' stepper controller which provides interface options:
- TTL serial
- I2C
- RC hobby servo .. so my thought is that I could 'add' this T500 + servo into my Ez-b project as either a:
- vertical servo or
- continuous servo .. and the Ez-b will treat the T500 + stepper as if it were a servo which is exactly what my hobby RC radio does.
Please advise if I am taking the correct approach here? Or should I be using this robot skill https://synthiam.com/Support/Skills/Servo/Stepper-Servo?id=21134
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skill (view all robot skills)

PWM Slider
by Synthiam
Slider to set EZ-B digital PWM for motor speed or LED brightness; shows duty-cycle, stop button, and board/port selection.

Good point, ptp. Guess it comes down to what his application is. I seem to be enjoying exploring the idea of controlling the stepper as a servo by knowing/counting its steps - merely because I find it intriguing.
That might not be his best usage case for the application. guess we’ll have to see what he comes back with
i should add that the servo would be easy and the best solution
Wow .. thanks guys for your enthusiastic input. I have more than one option to explore now. I want to use steppers as a substitute where HDD Servos simply are not holding the load. I am building a B9 robot full scale from Lost in Space original series .. many B9 builders have used EZ-build as their core controller. So I have an arm about the same dimensions as a human arm and while servos perform well at the extreme end of the arm (claw and wrist) where weight is minimal .. as I move toward the shoulder I have two articulation points .. call them elbow and shoulder. The elbow joint must support the forearm weight and the shoulder must support the entire arm weight. I treat these 2 joints (elbow and shoulder as absolute position servos .. in exactly the way your humanoid robot does). Now .. in addition to this I have a carriage which extends/retracts the entire arm assy on a rack & pinion .. I want to drive the pinion with a stepper emulating a continuous servo. What I have taken from your suggestions:
I don't actually know if the steppers I am using will handle the torque required in practice .. I have assumed they will but I hear you saying that steppers do not have high torque which concerns me .. my fellow B9 builders have used DC gear motors (typically a windscreen wiper motor) for these functions via a Sabertooth .. I may have to take this path.
Regardless of the path I end up taking, the real win here is that I have learnt a great deal from you guys in a short time. This bolsters my confidence using EZ-robot and ARC .. I will in turn pass this confidence on to my fellow builders.
Thanks DJ and associates for your time.
I think that #2 is what ptp is suggesting, and i am keen to agree with him now.
One of the things we used for the 6 foot JD are 3d printed shoulder brackets from the Inmoov robot. They work really really well and are very strong. Do you have a 3d printer?
I do have a 3D printer .. please advise type of motor you use on your 6 foot JD and/or Inmoov .. as this will have similar demands to my build. I would be very interested in looking at the STL files for these shoulder brackets pls. I was hoping the server emulation approach would suit .. so you have sured up that idea. However .. nice to know I can Java script solutions also .. using ARC.
Either way, you'll have to use ARC eventually because it is replacing ARC
The motor is merely a large servo. But the bracket STL files matter most. They're from the InMoov shoulder. I'll have Jeremie post the STL files for you here when he sees this. He's "working from home today"
The servo emulation with Tic and a stepper motor will work real good i think - if the motor can get enough torque
Hello @mbrooks,
A rack & pinion system with linear slides may be ok for a stepper motor as it doesn't have to exert too much torque. The motor isn't carrying much of the weight in that type of system, it's mostly on the rails.
As you can see here, even steppers that are huge and are labeled "High Torque" don't have nearly the amount of torque as a 40kg/cm servo or DC gear motor. Geared Steppers do exist but they are rare.
Here's where I got the STL files from initially. I modified them to work with a different type of servo. I will have to ask EZ-Robot if they are ok with me publishing the files.
Jer - do you have a picture or video of the assembly we're talking about so he can get an idea of what to expect?
Yes, there is a detailed build tutorial with many pictures on the inMoov website.