
PRO
Sproket
USA
Asked
— Edited
Hello everyone,
Im using the HC-SR04 , works well but when using the Radar it detects then bot move back and just keeps doing circles. I tried all different settings. The sensor is fixed not on a servo. What do you recommend?
Thank you all
Related Hardware (view all EZB hardware)

EZ-B Iotiny
by EZ-Robot
Control IoTiny with Synthiam ARC: 100MHz Cortex‑M4 Wi‑Fi IoT/robot controller-camera, servos, ADC, I2C and digital I/O for easy internet automation
Wi-Fi / USB
Servos
8
Camera
Audio
UART
✕
I2C
ADC
✕
Digital
✕
Related Robot Skills (view all robot skills)

Ultrasonic Radar
by Synthiam
Ultrasonic on a servo sweeps 180°; radar shows distances and obstacles, integrates with movement panels for automatic avoidance, scriptable GetPing

Ultrasonic Collision Detection
by Synthiam
Stops robot movement (no steering) when an EZB-connected ultrasonic sensor detects an object within a set range; integrates with scripting and paused polling.

Dual Hbridge
by Synthiam
Two-channel Dual H-Bridge movement panel to control two DC motors (on/off) for forward, reverse, left, right via EZ-B digital ports; no PWM speed.

hi sproket
these are my settings for using only forwart detection . maybe this helps .
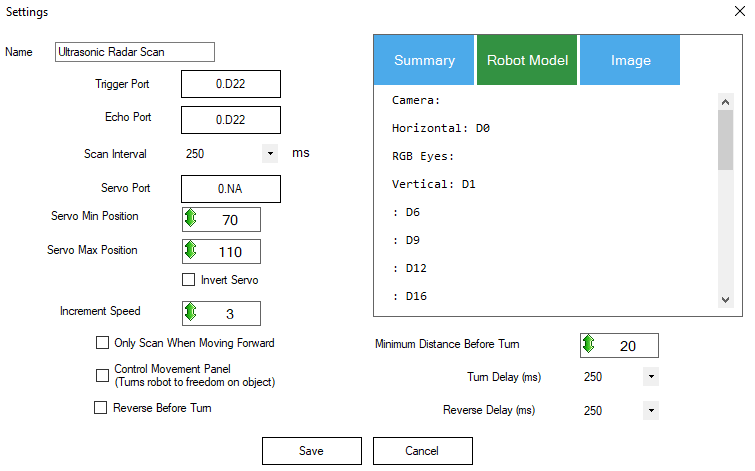
i use the original sensor from ez robot . one cable wire . i dont use the sero port .hey jedi
i made a simpel script to detect forwart motion .
controlCommand("Ultrasonic Radar Scan", "PauseOff") sleep(300) ping_wait(d22,d22,lower,20) sleep(300) controlCommand("Auto Position", "AutoPositionAction", "Wow") sleep(1000) controlCommand("Auto Position", "AutoPositionAction", "Stand") sleep(300) sayezb(" stop that please ")
https://www.youtube.com/watch?v=SZP_WiOho1Q
I remember when I tried to do a proximity sensor setup with my Six Hexapod, it would always get stuck at a wall.
Nomad 6R I will check it out. Thanks man.
Stop it please, love it
Scripting seems the way to go on this for sure.
hi winterU
did you use the same sensor as in this topic ? if yes were did you placed the sensor ? ontop the six dome ?if yes you have to calculate that in your settings . cause you need to ad the distants from the dome to the front of the legs , before the sensor need to detect something .
hi jedi
if you want it in a loop . see picture .
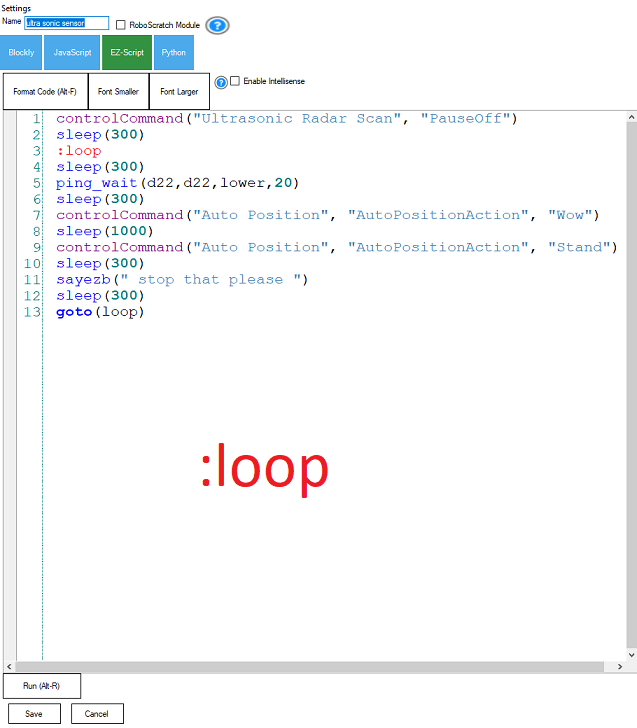
use your own ports in the script .some more actions to test .
https://www.youtube.com/shorts/z-PWWYJ-sp4
Yes loop
I was diving into that a little this morning
jedi
always make a small sleep(300) between motions to be sure they work . sleep(300) give time for the next motion to come when the previous is done . the longer a motion last the higher the sleep needs to be . sleep(1000) is one second. but you problably know this allreddy .