
Turn Adventurebot Using Angles
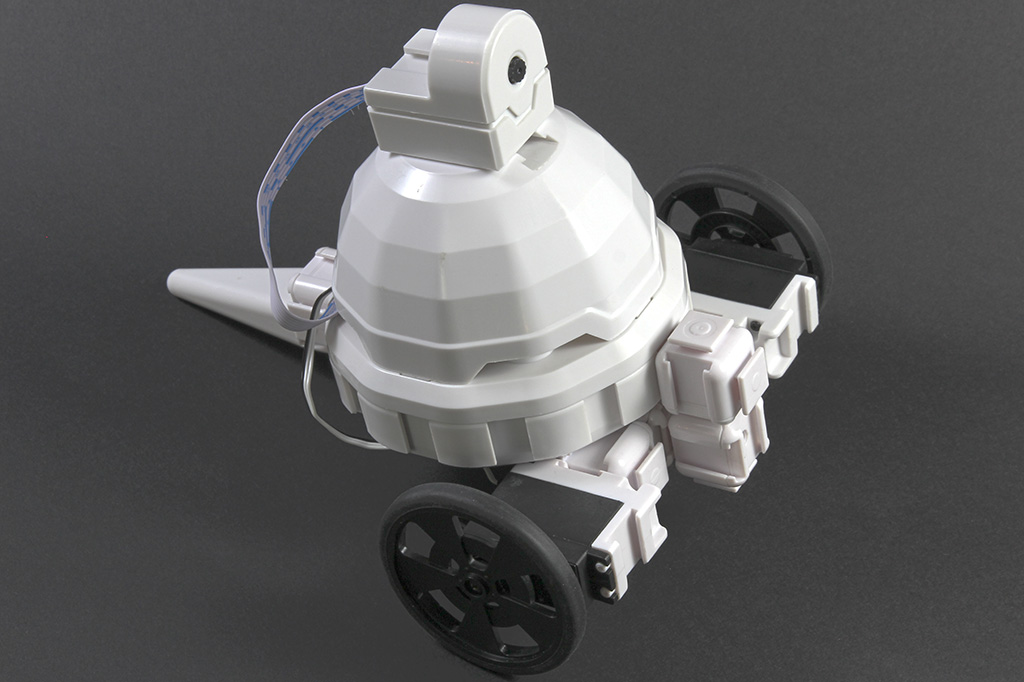
I am pretty new to working on the AdventureBot, and a class project requires me to make it turn at certain angles, such as turn left 55 degrees, turn right 34 degrees, etc. I have tried varying the speed of the left and right HDD motors, but to find an angle I have to do several tries to find the perfect setting, and repeat it for new values of angles. Also, the speed settings change with the surface of the floor. I do not seem to find a pattern in the left and right speed values either, through which I can write generic code for converting motor speeds to exact angles either for a particular surface.
Has anyone faced a similar problem? If yes, then how can I implement such an operation on AdventureBot? Is there a library or app that I can install on ARC?
Thanks
Related Hardware (view all EZB hardware)
Related Robot Skills (view all robot skills)



Without additional hardware this cannot be done accurately with the stock AdventureBot..... You will need either wheel encoders or an accelerometer/gyro (for example an mpu6050 accelerometer)...
I only can offer links for some help:
EzAng
@Ezang: If you know how to do it, please post the solution.
ptp, I just got back,
DJ should answer this one
@EzAng: Why you post the above URLS ?
trying to help as I stated above, my friend
I will try with my adventure Bot later
OK makes sense. You don't know the solution and you post random links for other people to follow and waste time.
@EZAng... I had already answered him and gave him solid advice. If you didn't know how to help him you should not have responded.... Perhaps you didn't understand exactly what the OP wanted to do... That's fair, but just be careful with helping if you are not clear in what is being asked...
FYI... you cannot use timing (sleep commands) to accomplish this... motor output varies and so does battery voltage. Even the surface the robot is running on (friction) will cause different results... As an example the robot will rotate a certain amount depending on battery voltage... Voltage drops so does your turning angle.... Solution.... You need wheel encoders or an IMU (accelerometer/compass) for precise angular rotation...