TripleJ500
Movement Tracking Not Working
Hello, I have a n issue that I recently ran into and was wondering if anyone had any suggestions on how to fix it.
I've been working with my Revolution Roli robot for almost 2 months now and everything had been working fine up until now. Whenever I try turning on Movement Tracking in the Camera Device skill, the robot does not move at all, even when a learned object is in it's view (To be more specific, I am tracking an object by it's color. The color is showing up fine in the Multi-color picker and the focus box is showing that the object has been recognized, but the robot is not tracking it). I've double checked the wiring to make sure that everything is properly hooked up to the board, I double checked to make sure all the servos are assigned to the correct port, and I have tried creating a new project from scratch, as well restarting my computer, but nothing is working.
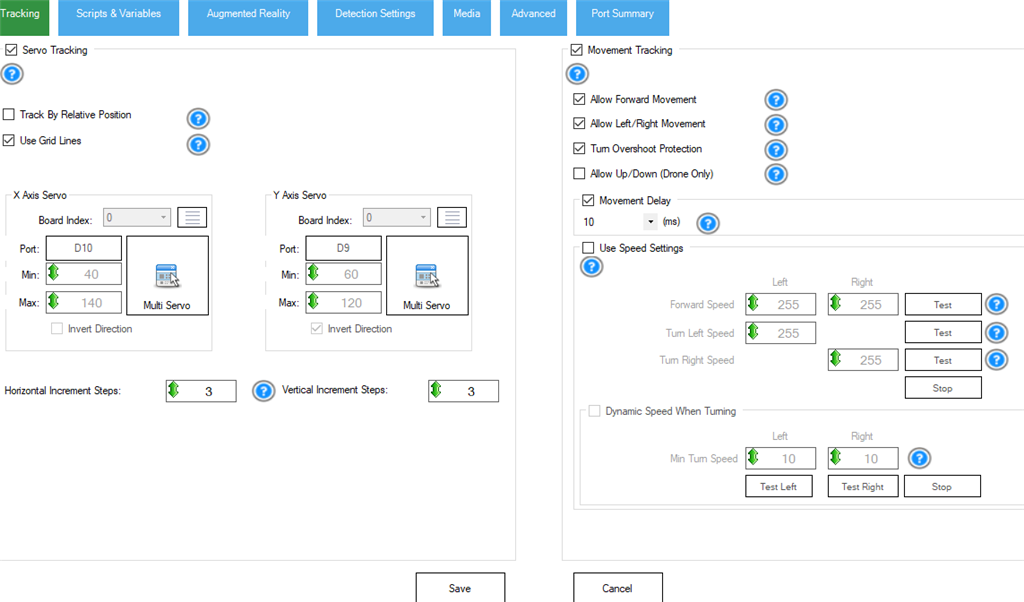
Also, I have tried using the HBridge PWM Skill to move the robot around manually and that works just fine, as well as the servo tracking. It seems that only the movement tracking is not working. I have attached a picture of my Camera Device settings as well. Any advice on what to do?
Related Hardware (view all EZB hardware)

Related Robot Skill (view all robot skills)


Hi, I would try to reinstall ARC and see what happens.
Start with a new roli default project. There’s a great robot program episode on how to use it. Without seeing your project, im unsure what changes are needed.
@DJ I'm not sure what exactly was the reason but it seemed that starting a new bare Roli project helped. Thank you sir!
If you want me to look at your project I can. I’m wondering if it’s a setting on the scripts page. There’s a checkbox to enable tracking. It’s like a global setting.
@DJ I would actually appreciate that, where do I need to send the project?
Attach it to your message when replying
Search and Rescue alt 4.EZB
In your project, the HBridge PWM robot skill is not a movement panel.
You would need to add the HBridge PWM Movement Panel instead of simply an hbridge PWM. You can click on the words Movement Panel to read what a Movement Panel is and how it works.
Also, be aware that the speed will default to 0. So you either need to set a constant speed manually or use the Variable Speed in movement tracking in the camera settings. The question marks and camera device manual explain more...