
PRO
afcorson
Australia
Asked
Do you know if ARC is compatible with a RoboClaw 2x30A Motor Controller? - see link: https://www.basicmicro.com/RoboClaw-2x30A-Motor-Controller_p_9.html
Related Hardware (view all EZB hardware)

EZ-B Iotiny
by EZ-Robot
Control IoTiny with Synthiam ARC: 100MHz Cortex‑M4 Wi‑Fi IoT/robot controller-camera, servos, ADC, I2C and digital I/O for easy internet automation
Wi-Fi / USB
Servos
8
Camera
Audio
UART
✕
I2C
ADC
✕
Digital
✕

@DJ Can you take look to the outputs:
Based on @Afcorson input:
Sabertooth manual: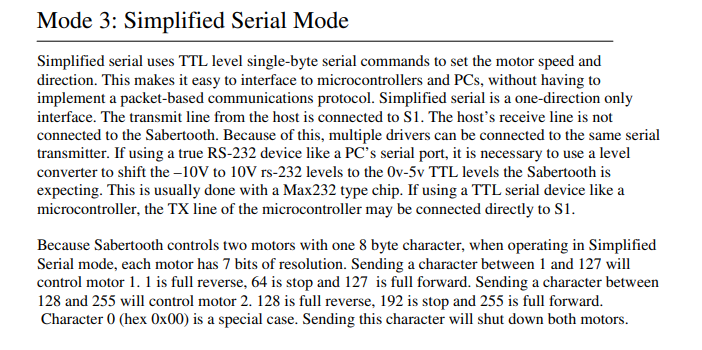
At full speed:Forward should be 0x7F, 0xFF Right should be 0x7F, 0x80 Backward should be 0x01, 0x80 Left should be 0x01, 0xFF
The control output is slight off in some cases, if the values are not proportional a 2 wheel robot may turn more to one of the sides.
Looks like I’m mapping to those values...
@DJ: The mapping is correct The output is incorrect
you have a bug in your code:
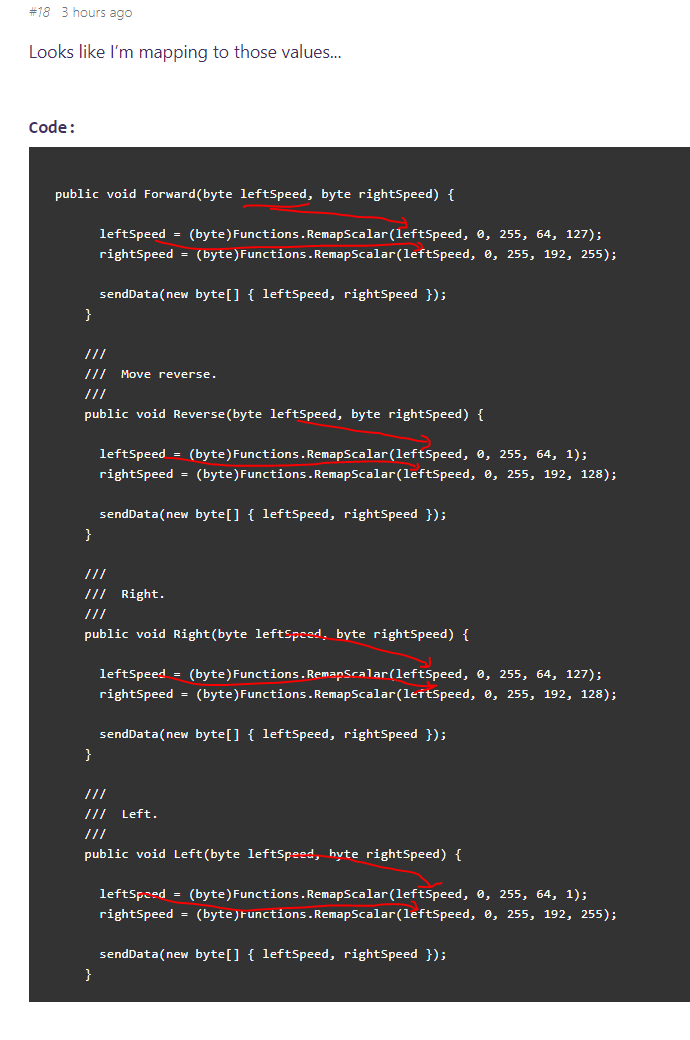
you are using the calculated leftSpeed to calculate the rightSpeed.I believe this why RoboHappy complained about the Sabertooth erratic behavior and Richard mentioned he used a custom panel: https://synthiam.com/Community/Questions/Servo-Movement-panel-Unable-to-turn-left-or-right-19185
One more query. As soon as I disconnect the USB connection from the Roboclaw to my laptop, nothing works. Somehow I need to enable TTL serial mode as I don't want to be tethered to a laptop to use it. I seem to be missing something here, as I can't find a setting to get it working without the USB connection.
good catch ptp. Update to the latest plugin: https://synthiam.com/Products/Controls/Movement-Panels/Sabertooth-Movement-Panel-16039
@afcorson: Keep the usb disconnected. I presume you have the main power source connected, do you see any lights on ? Can you measure the voltage between the (+) and (-) ?
Stat2 light is green indicating both motors are active. Voltage is 24.8 to the main battery connection. I'll install the ver3 plugin and see what happens.
Measure the voltage between + and - near the S5 contact. The idea is to troubleshoot if the controller DC/DC is still operational, you need to have 5v on those pins. be careful when using the multi-meter probes to avoid a short circuit while trying to measure.
My guess is: When you connected the S1 (+) and (-) to the EZB you short-circuit the DC/DC output voltage with EZB Vin, sometimes is enough to damage the 5v regulator. The reason why it works with an USB cable is because the controller has a switching circuit to switch between the USB power (when you are configuring the controller) and the controller 5v regulator, in absence of DC/DC the switching circuit uses the USB voltage.