Asked
— Edited

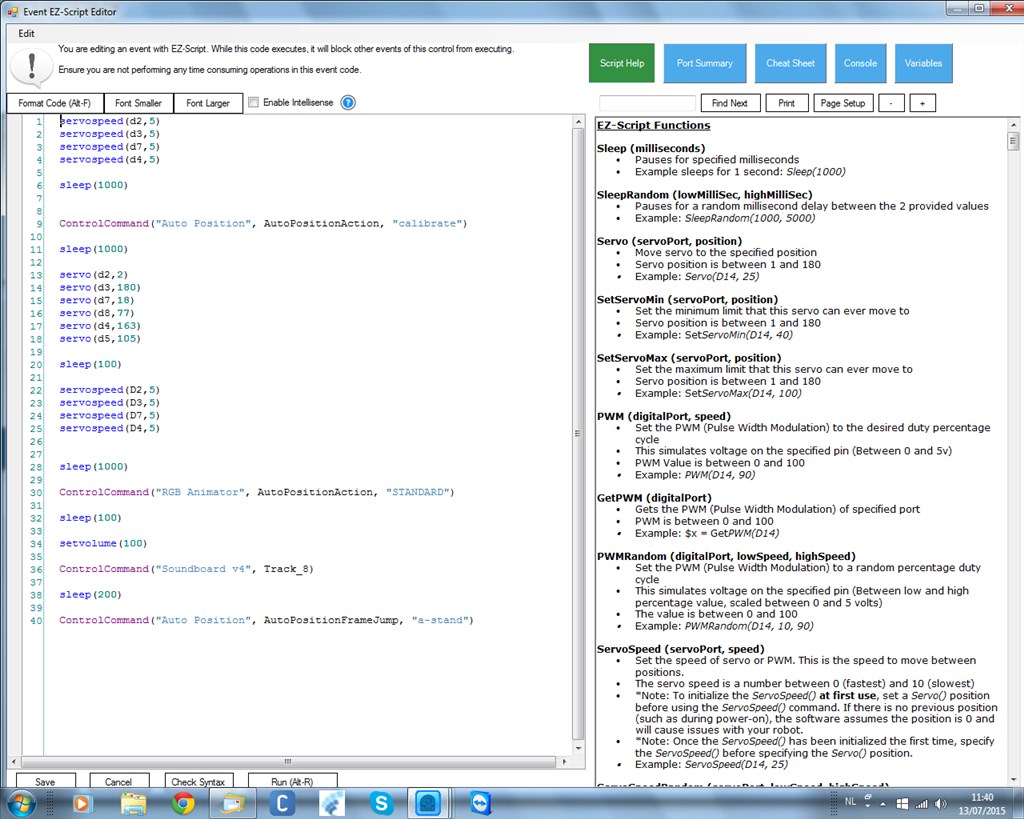
How To Get Init Script To Go Slower Servo's?
am looking when i power jd on the pose he wil take goes slow. as in the video he does it slow but not when the init script runs.
 Openai Chatgpt
— ChatGPT conversational AI for ARC robots-configurable personality, memory, image description, script execution, speech and API integration.
Try it →
Openai Chatgpt
— ChatGPT conversational AI for ARC robots-configurable personality, memory, image description, script execution, speech and API integration.
Try it →
am looking when i power jd on the pose he wil take goes slow. as in the video he does it slow but not when the init script runs.

I think this might be looking for. Here are slight changes to what you have, and you will want to add you Cheat Sheet commands in as well. Give it a try and let us know if this what you want...
Also one peace of advice. When you want to share scripts in a post, it's better if you use the UBB code. That way it's easier to look at and easier for someone helping you to copy the code and make changes.
Write or copy your script where it says "text" inbetween the [ code ] and [ /code ] UBB codes .
Hope that helps.
it works perfect.
code text code dont understand how that works?
No problem. Glad it's working the way you want it to.
In regards to posting a script, if you don't mind, I will try to teach you how..
1) First, you need to use this [ symbol
2) Then write the word Code
3) Then use this ] symbol
4) Write your script, for example, Servo(D5,90)
5) At the end of the script use this [ symbol
6)Then use this / symbol
7)Then write the word Code again
8) Then finally use this ] symbol
It should look like the following picture...
Or you can write it like this...
And you will end up with this when you post your response...
I hope that helps . It just makes it easier to make changes or to test someone's script without having to re-write the whole thing. If you want, post a reply back and give it a try.
. It just makes it easier to make changes or to test someone's script without having to re-write the whole thing. If you want, post a reply back and give it a try.
the code you teach me
how do i get this on one black page?
Yeah, you got it.
A you need to do is put the first [ code ] at the start of the first line of the script, and the [/ code ] at the very end of the last line the script...
Nicely done Nomad.