Asked
— Edited
How To Cut The Port Power After Completed The Action
Hi,
I have a problem about the servo, it is easy to burn out after completed the command. It is because the last position keep holding. Then, the servo overheat and out of service.
So, anyone can tech me that how to write the script to cut the port power until the next command order? Or Just use the "servo release" to fix it? Or other methods can improve that?
Thanks for your attention!
Ricky Ma

Servo Release is the method to cut power to a servo. However, unless your servos are under strain, simply holding position should not be damaging them.
Alan
Or add the servo release commands to the action stop script. Every time an action stops, it runs the script. servo release makes more sense.
What servos are you burning out on the inmoov? Have you poked Bob or Richard about what servos they use?
Hi DJ & Alan,
Thanks for your reply and suggestion!
Hi DJ,
Would you write the script example for my reference? The servo is mainly to use to the robotic mouth and sound servo mode. But, I don't know how it is easy to burn out ( the servo life is very short). Maybe, the servo from back to center position on the wrong angle or keep holding. Therefore, I think to use script to stop the power on the port until the next command!
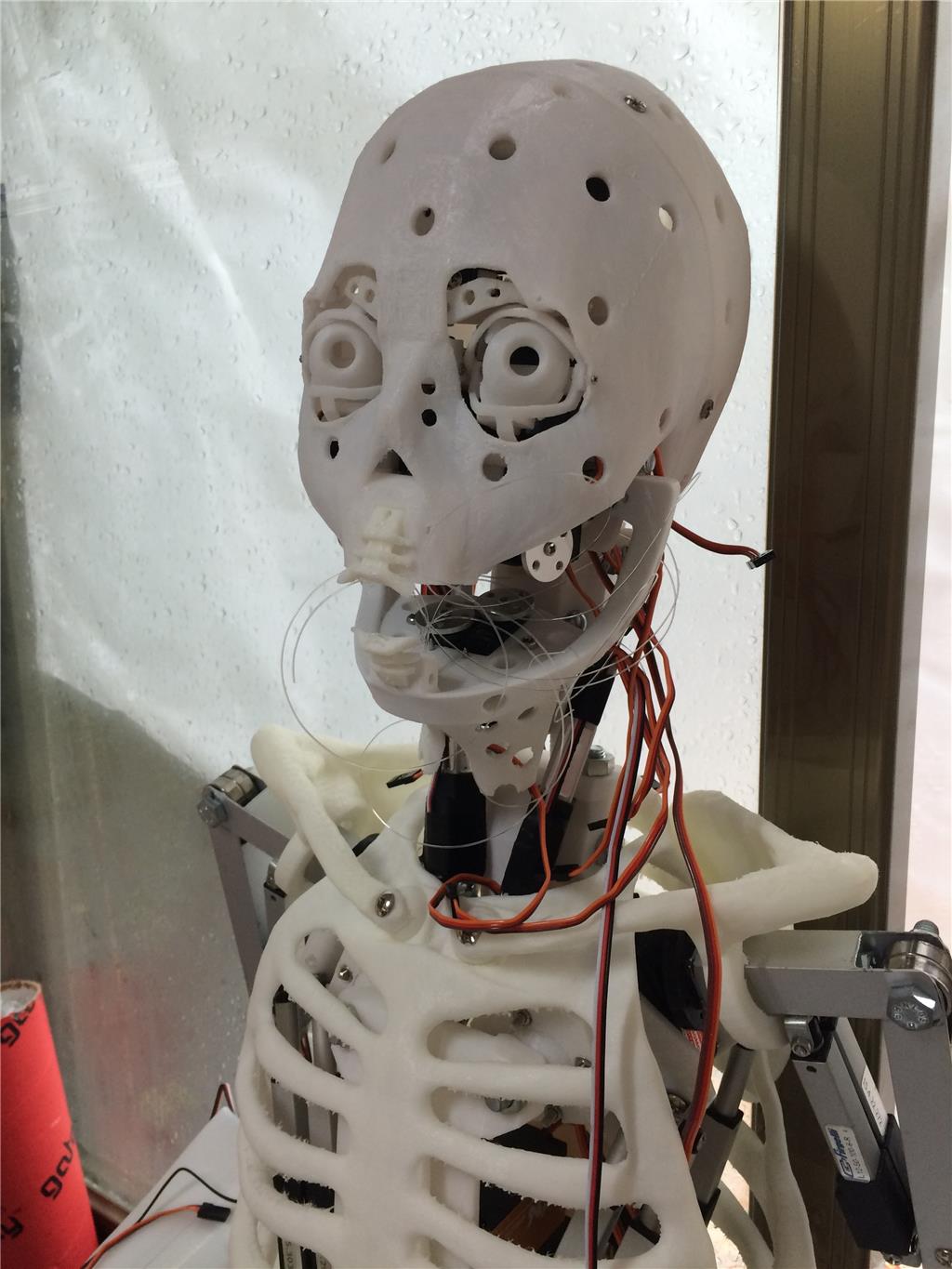
Besides, I'm not making the inmoov. I just make my own robotic! Pls. see the attached photo for sharing!
Hello Ricky Ma,
Nice Job with your Robot design !
I just want to ask is the servo you are using able to handle the voltage supplied? A 5 volt servo on a higher voltage (7.2 or higher ? ) will have a shortened life.
Regards,
Ron
Hi Ron,
Thanks for reply!
I use the servo is between 4.8-7.6 voltage. So, I'm not sure the damaged reason!
Regards Ricky Ma
@ ricky Make sure that the servo isn't defined or bring controlled in 2 places. I know some people building the Inmoov robot had this same problem (burning out the jaw servo). For example, make sure that the servo is not in an Auto Position frame and being controlled with the Sound servo or Talk servo controls. You may want it to be only controlled by the Sound servo Control.
Or - if the servo is in the Auto Position, use the -1 in the Auto Position on frames where you never expect the robot to be talking.
As for the "Script", here is an example to release a servo:
The script can be added as mentioned - to the Auto Position Stop script.
-or-
Use the Auto Release, as mentioned as well.
DJ, I have a question about that -1 use int he auto position. When you select that, its really suppose to skip over that servo completely? and causes that servo to not move for only that frame?