
robocen
Hong Kong
Asked
— Edited
How Many Ez Robots Can Be Connected To The ARC At The Same Time?
Hello everyone!
I am wondering what is maximum number of robots connected to the ARC at the same time?
I tried to look for the answer in the learn sections, but didn't find one.
Thanks!
:D

256
Alan,
Thought you were joking about the 256, until I remembered that you have that many addresses available.
Actually I miss-spoke, it is 254 not 256.
Only one can have a movement panel, and there are a handful of other limitations, but yeah, the software supports adding 249 additional connections using the "EZ-B Connections +" control.
Obviously they need to be in client mode so they are all on the same network, although they don't technically all need to be in the same subnet.
Alan
Guys,
The limit when using the ARC/Project is 5.
ARC tracks EZBs from 0 to 4 (Connection Panel) and the value is validated when used in a script command.
Like alan said, there are some limitations:
only one Movement Panel and needs to be on EZB 0
Some commands allow a parameter boardindex
other commands mention a parameter ezb Index
and other commands allow to combine board "." port
via SDK there is no limit, you can create multiple EZB instances.
No, it isn't. See the "ARC Connection +" object. You can add another 249 connections from it in one project).
Alan
I believe the practical limitation would be dependent on the rate of network traffic going to the robots. Even 1 robot can put a heck of a lot of traffic on the network if sleep instructions are not used in loops. Also, I think the video signal from the cameras goes across the same network. Another source of high traffic. Additionally, placing robots on directly adjacent Address slots can lead to some interference one to another. So it's often a good idea to space them more than one address number apart. Finally, none of that includes whatever else may be connected to that same network at any given time. That includes your internet connection.
Alan,
You are right... I didn't know about that control.
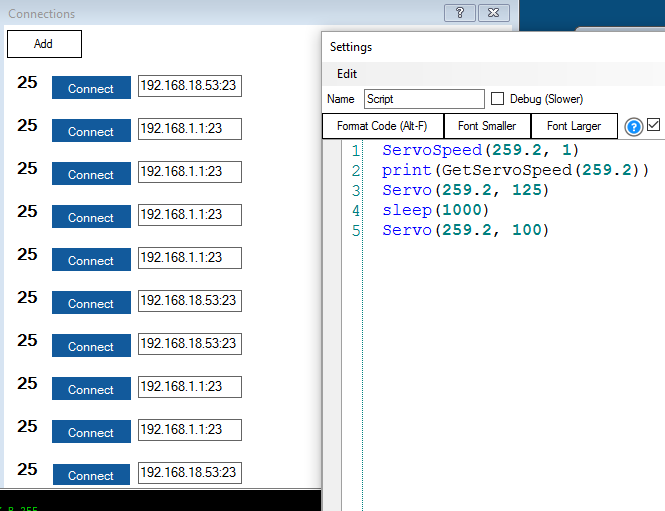
i just checked, i added more connections and the limit is 260 (0..259)
It's good to know... Is insane no one can't complain now !
Let's wait for the first project with 260 EZBs !
I guess with 260 they will need to be on different subnets.
Alan