foxtrot25m
Canada
Asked
— Edited
Dj Robot
when the robot is doing head stands or push ups it seems to fall flat on his face when on a wood floor and this causes the head to slowly come off, and it eventually falls off and must be put back on quickly so it can't fly around

Hmmm... guess you haven't assembled it properly... ? His head should not come off if it was assembled properly....
it was, i made sure of it but i think the problem is that, its that the robot is not meant to smack his head into the hardwood floor every time he does those 2 moves, and the repeated use of the moves edges it off bit by bit no different then detaching it yourself.
So stop making his head smack the floor, then lol.... slow down his moves... You can adjust servo speed as required...
What you'll need to do is either of the following: 1.Adjust the movement/frame sequences so he doesn't face plant or... 2.Adjust servo positions in the frames, if you mean that when he is in the head/handstand he falls over
As for the head falling off, yours is a special bot. Try scuffing up the 2 connectors with sand paper or wire brushes(don't do too much though).
Try scuffing up the 2 connectors with sand paper or wire brushes(don't do too much though).
i have just been running the demo provided and the commands testing them out to make sure it will work consistently without issues when its in the store but the head came half way off and i grabbed it before it fully came off after 3 battery charges of testing "moves" alone, no walking around (i have not gotten there yet)
i have started testing the demo 2 program and the one online you need to adjust all sleep counts to min 6000 but thats as far as i got today and it seems to work until the pushups where it just skips getting up and belly flops and i turn it off and try again. i have been careful to always turn it off as soon as the program goes outside of what i planed to make sure the robot is not damaged though.
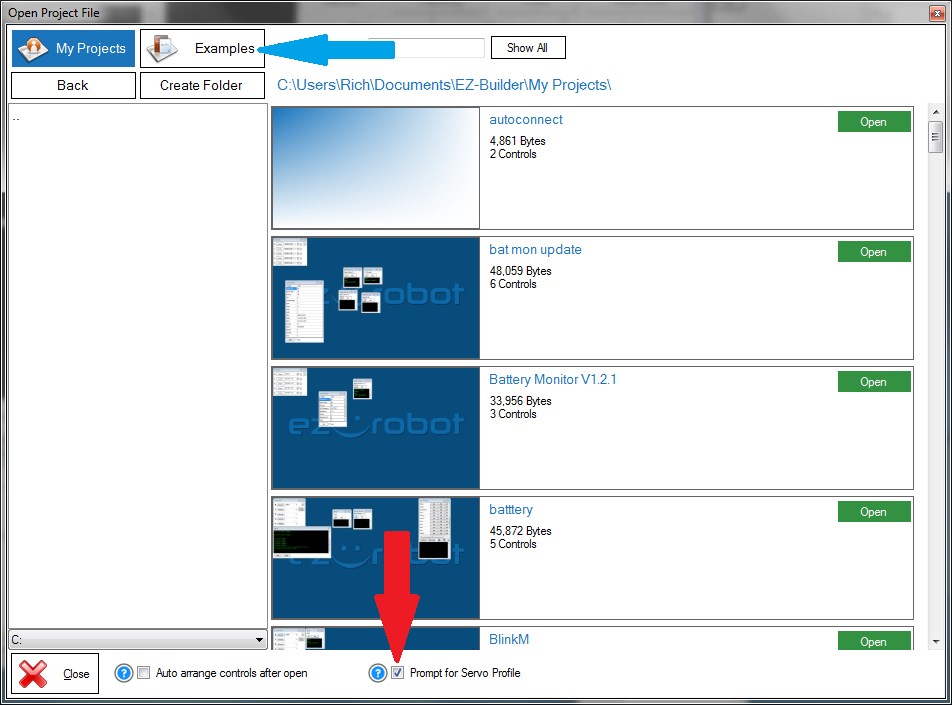
How do i adjust the servo speed i have seen the 2 options to reset and release the servos in the menu but i was not sure what they were for.
also you should while i am thinking of it the cables in the feet do not come put into the holes at the back so the robot can't step on the wires but i noticed it in the manual picture and corrected that, you should add a note to the manual tho or someone's bound to have the robot tear the wire out stepping on it
thanks for the info you posted while i was writeing last post
so can you think of any good reason why my robot is face planting on the default moves and is different than it should be? i just want to make sure im not missing anything here and its not only doing this because of a mistake i made
It could be you missed something, A manufacturing bug, or just a need to calibrate the servos. By the looks of it you already did but double check.
Maybe a video is needed to zero in on the problem.