
allanonmage
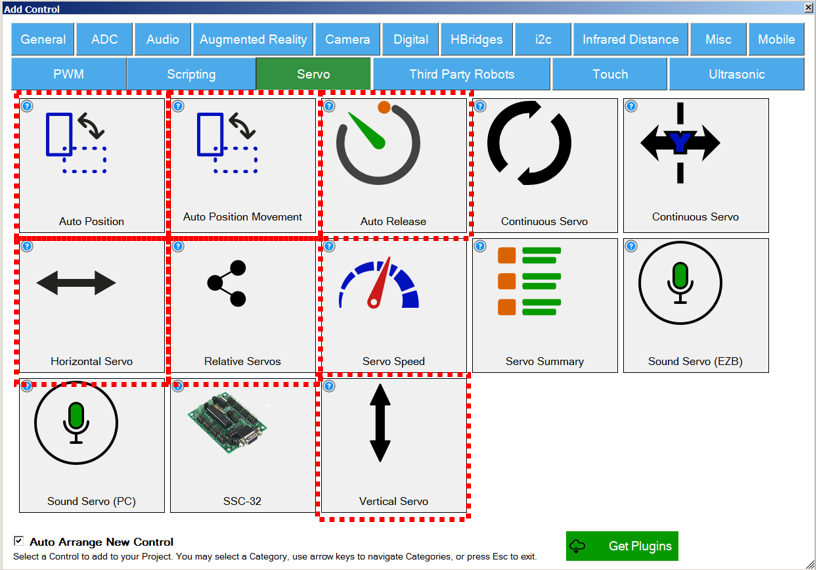
Controls: Auto Position, Auto Positiion With Movement, . Which Do I Use For A Se
I've finally started tinkering with ARC. I've gotten my EZbv4 mounted to my RoboPhilo, and a power connector added. Now, I can start the dreaded task of programming!
I've looked through various tutorials, videos, and the manual and I'm not finding what I'm looking for, but I have gotten close. I need to add in the servos for the robot, and I'm not completely clear on how to do that, nor which ones I need to add.
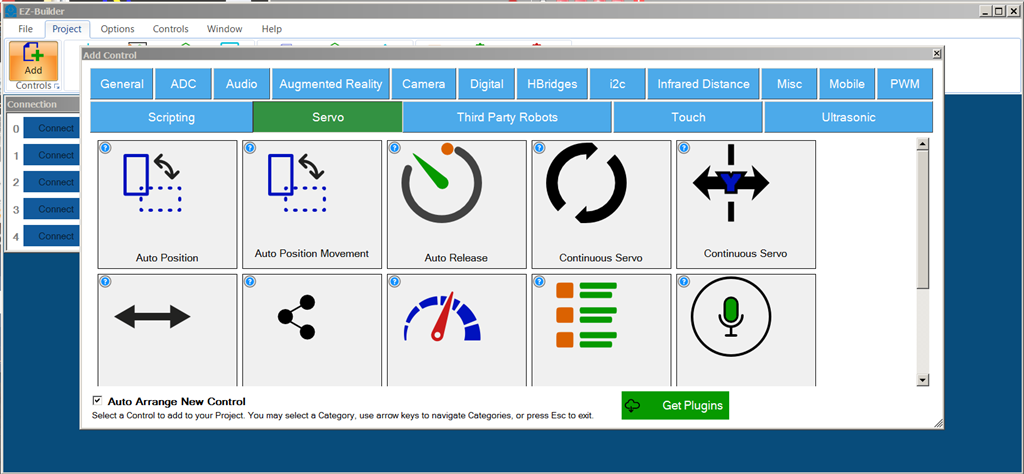
I found This page by clicking on the (?) icon on the two different servos: auto position; Auto Position with movement. However, since they go to the same page, I have no idea what the difference is, nor why GAIT is in all caps. After reading the page, it looks like the word is used as the robotic term of 'gait' and not an acronym of any kind.
There are sections "Auto Position With Movement Panel" and "Auto Position Without Movement Panel", but isn't that talking about a dialog within ARC and not the servos to add?
Why would I choose any of different servos over each other?
As far as I can tell, these are all standard servos that move ~180 degrees. However, I need to set limits in software so that the servos can't move ouside of the designed range(s). For example, the small hip servos can't move the whole 180 degrees.
Ultimately, I'd like to run this project from an android device, but for now I'm building this on a PC.

If you go through all the tutorials, you will see that in any of the servo controls you can set ranges. With the AutoPosition control, you set frames which tell the servos exactly where to go, which prevents them from going too far.
I think there are scripting commands that do it too.
Going thru all the tutorials is a good idea - perhaps review the JD tutorials. To get you going though, I would use the Auto Position Control. In this control you can attach and set up all of your servos. I would start by creating a "Rest Position" for your robot and then go from there.
You're off to a good start - minus the many new threads that you have created in such a short period of time. Don't give us a reason to implement a per user thread limit

For clicking on the ? (question mark) is awesome - that's something many people don't do. However, it's a good idea to read the tutorial that is presented. If your question regarding the difference between the two Auto Positioners is still being asked, can you confirm that you had read the manual page? There is a section regarding each Auto Position and the difference between them. You can assist us by providing information of what information is not clear and I can update the tutorials to reflect that.
There are also videos in the tutorials which you can watch on how they work. If you had watched that, I'm sure you would be well on your way to a moving robot
Read the tutorials - watch the videos, and let us know what struggles you are experiencing so we can consider appropriate changes. What the tutorial layout is as of today is based on 20,000+ users feedback, so we're always welcoming more!
There's nothing additional we can add in a forum response that isn't already in the tutorials - so forgive everyone for sounding like a broken record. Simply click on the ? (Question mark) or click on the LEARN section with the mouse cursor on the top of this webpage.
Simple answer (not to contradict what others have said, which I fully support -- ie, all your answers are in the tutorials) -
Auto-position with Movement is for making your robot walk when you use the movement panel.
Auto-Position is for every other set of pre-programmed actions you might want the robot to do (Dance, do headstands, etc....)
Alan