
Autoposition Speed Question
Lately I have been doing a lot with the Autopositioner. One is having JD sit on a seat and get up again. The seat is about 43mm high which is just right for JD to sit on with the knee servos at right angles to the feet and the upper leg servos at right angles to the knees so as to form the perfect seated posture. The sitting on the seat operation is only basically one frame and goes very smoothly. The standing from the seat is more complicated since JD has to maintain balance as he stands, therefore has several steps.
My problem is that the first step in which he rises part way in the overall action goes as fast as it can no matter what I try. I have set each speed setting in each frame of the action to 4 to try to slow things down, but it stays the same. I have also tried using the script to set the speed for all the servos, but still way too fast. I have even added an extra frame at the start which is just like the last frame of the sitting down operation so it starts in the same position as it had in the last when JD sat down. I only moved the arms out in preparation for standing. That one runs nice and slowly but the very next frame goes at top speed still.
This is how the frames look in the Action Editor: Stand From Seat0(Delay: 25, Steps: 3, Speed: 4, Script: False) Stand From Seat1(Delay: 25, Steps: 3, Speed: 4, Script: False) Stand From Seat2(Delay: 25, Steps: 3, Speed: 4, Script: False) Stand From Seat3(Delay: 25, Steps: 3, Speed: 4, Script: False) Stand From Seat4(Delay: 25, Steps: 3, Speed: 4, Script: False)
Any suggestions? Yes, I have gone through the tutorial. Several times. And tried looking through the posts, but there are 94 of them!

Have the first frame being JD in the sitting position. This would have no movement for the first frame as he is already there. From there, I would think that your timings would work well.
@d.cochran Thank you for your reply. That is what the first frame (Stand From Seat0) is. It is a clone of the last frame of the sitting action. The only modification I made to it was to have the arms spread apart and raise somewhat. And that frame works properly with the arms going at a nice slow pace. The very next frame, however, goes at full speed. I have to hold down the feet so Skippy doesn't fall over. Basically the standing action works properly, just way too fast.
There are question marks beside each option. The speed setting adjusts the speed of a servo between positions. As you have been informed, the Ezb or computer does not know the position of a servo, it only knows the position that it told the servo to move. If the servo is still moving because the speed is set slow, then it will still skip to the next frame. That's what is happening.
Hover your mouse cursor over the blue question marks to see what the options do.
I would recommend setting a value of 1 for steps and a value of 50 for delay. That will make that action move much slower. You can increase the delay if you need it slower.
You can adjust the speed after to smooth the movement between positions.
Also use the PAUSE frame often. It will help you pause between frames and let the servos catch up.
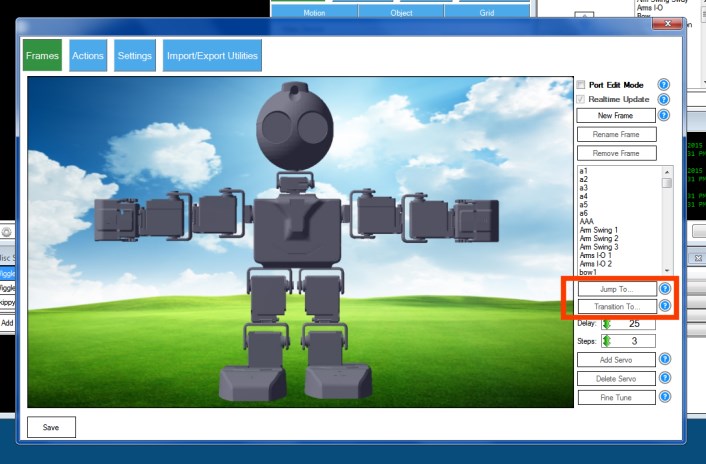
@DJ Sures Thank you for your response. I'm confused though (yeah I know, big surprise ). When I hover over the question mark next to the "Transition To" button in the frame setups in Autopositioner, I get exactly the same message as when I hover over the "Jump To" button question mark. So that's not much help.
). When I hover over the question mark next to the "Transition To" button in the frame setups in Autopositioner, I get exactly the same message as when I hover over the "Jump To" button question mark. So that's not much help.
Also, what is a "Pause Frame?" I see no such frame in my list of frames in the AutoPosition component (with movement). I derived all my stuff from the original JD project available in the cloud. Is this something I have to create? Can't find any reference to it in the manual concerning the AutoPosition topic either. Nor does that section address the Transition To or the Jump To buttons or how to use them.
I did as suggested and set 1 and 50 but when going from my first frame to the second the robot jumps instantly to the second frame. This is also the case when I do it manually. That is to say, I click on the first frame and the robot sits down nicely. It should be at a known position then. When then click on the second frame of my frame set, it goes instantly to the new position.
I set the Delay to 200 and then I could finally see what was happening. When I click the second step of my stand from seat action (after clicking the first frame first), the robot jumps instantly about half way then goes slowly the rest of the way. Does that every time. Click first frame, sits nicely, click second frame jumps half way then slowly the rest. I have even waited a couple of min. between first and second frame and it still does the same thing. Also, if I then click the third frame after the second, that, and subsequent frames, execute slowly as they should. I even tried going from clicking the first frame to clicking the third frames. Same thing fast about half way up, then slowly the rest of the way.
I just tried creating another frame which is just like the first but only moves the arm servos a little then tried clicking that one as the second frame instead. worked fine, nice and slow then clicked the old second frame and the same thing.
I'm at a loss how to get that second frame to move slow right from the beginning. It's as if the program loses it's position from the clicking of the first frame to the clicking of the second.
@WBS.
Hey buddy. The "Pause" frame is automaticly generated and appears at the end of your "Frames" list as highlighted below...
Inset that I between your frames in the "Action" window on the right.
As for the speed issue, I don't know this is what you are using, and if it is and already tried it I apologise, but are you using the "Edit" tab in the "Action" page...
If not, click on to highlight the frame you want to change and click "Edit". From there you can adjust the individual servo speed in the frame. I can't be much more help right now as I'm in a train heading home and writing this on my phone using some old screen shots, but hopefully it might help. It might be an idea to post the project link in this thread so we can take a look at it.
@Steve G Thanks very much for taking the time to post from your cell phone. The image you included is interesting. Apparently it must have come from an AutoPosition component with nothing else in it. I've been using the Autoposition With Movement component that came with the JD project from the cloud. It comes pre-loaded with many Actions and their associated Frames. It's that one I've been using all along. So when I go to the same area in it as shown in your image, the column with the frames is loaded with frames from all the actions that are listed in the leftmost column. Still, nowhere in the Frames column is there a Pause Frame.
I guess the one in the image is of the type from an Autoposition Without Movement kind of Autopositioner component and has no frames in it except the ones for the ones associated with the only action shown. Basically the result of an Action created in newly added AutoPosition component. As I recall the manual says you can have as many of them as you need.
Yes, I did try using the Edit function to place delays and slower speed commands in between the frames, as well as, before the first frame even but it didn't help the problem, which makes it all the stranger. They did make things slower and with greater delay but there was still that full speed jerk at the beginning of the second Frame.
Anyway, I'm going to try one of the AutoPosition Without Movement components next and see what happens doing it that way. Maybe there is a difference in the two types of AutoPosition components besides just the movement controls.
Thanks again.
Well, as I was exporting the frames and actions needed to import into a fresh Autiposition control, I noticed there IS a Pause frame listed in the choices of frames shown. Going back, I see it is also listed in the frames shown in the "Actions" tab section. I have been looking for it in the "Frames" tab section (makes sense don't you think?) and it is NOT shown there. Apparently there is a subtle difference in that the Frames tab section is only for those frames generated by the user, while the frames shown in the Action tab area also show automatically generated frames, like the Pause frame. Anyway that's why I never saw the Pause frame before. I was only concerned about editing my action in the Action section and never saw the Pause frame there elsewhere in the list.
No problem. It's a 4 hour train ride so I've got some time on my hands, and it beats looking at the scenery whizzing past , lol.
Using the same "Edit" method I mentioned, have you tried changing the speed of the second frame that's causing the issue itself? Yeah the frames tab is as you say, where a users frames are created, and the same proses was used to create the already existing frames that came with the project. There's nothing else I can think of at the moment (I have my laptop with me, but the battery died), so if you do post your project link as it stands at the moment with the changes you've made so far, I'll have a look when I get home, unless some one else beats me to it.
Auto position is something I don't use very much and haven't used it for a while so I'm a bit rusty with it, but I'll see if I can figure something out.