mav2k9
Auto Positioner
Hi, I am still very new to all this but have actually learned how to use Auto Positioner to open and close my robotic hand, using just two frames.
I have been trying to now make my robotic hand, which conists of four fingers and a thumb, to create a wave motion, where all the fingers open then close again, but with a delayed start between each finger, thus creating a wave motion of the fingers.
I was hoping to be able to use two frames for each finger, open frame and close frame, then run them as I did with a full hand open and close as detailed at the start, but delay the start of each frame to create the desired effect.
To date, I have been unable to find out how to achieve this, so I have had to leave all 5 servos on screen, then create around 50 frames, telling each servo what position to take at each frame, which is quite a long process and can start to get complicated, working out all the required servo positions individually for every frame.
Is there a way I can say, create a routine for each finger, which would consist of only two frames per finger, open and close, then be able to arrange to run these routines as mentioned to create the wave motion of the fingers opening then closing?
Any help would be greatly appreciated.
Thank you.
Related Hardware (view all EZB hardware)


Hi, just trying to help, I know your hand in more involved, same principle https://synthiam.com/Community/Robots/Robot-Hand-fingers-1-5-2020-18978
AutoPosition
Thanks, EzAng
Hi EzAng,
Thank you for your prompt reply and offer of help. Unfortunatley this does not answer my question, but I do appreciate you trying to assist me, thank you.
:)
mav2k9
an open finger is always 90 degree , excample servo(d9,90) is open servo(d9,100 ) can be close or servo(d9.70) depends witsh side left or right
depend how far you want the finger to close.you can see that in your auto position. 5 fingers means 5 servo's in auto position.
Have you watched any of the Auto Position tutorial videos on the Auto Position manual page? You should only need a few frames. And add them to an action.
Hi all,
Yes I have watched the video tutorial and read the guide.
I will video my current setup, showing what I have done so far, as they say a picture can speak a thousand words. I will provide a youtube link to my video for your help as soon as I am able this week.
Many thanks
:)
Excellent
also, this video might be useful...
Hi All,
As discussed, here is a link to a video showing my ARC setup and my project hand being controlled.
https://youtu.be/pD_8BCSeA2k
Please do not pay any attention to my frame names etc, they are not named in keeping with what they are doing, this is because I have been performing lots of tests to get it working to this stage, however the actions are appropriately named.
The video does clearly show all the information I hope you will require to see what I have done and how it is working.
Your help is always appreciated and if you have any further questions or need any further information please just let me know and I will try to provide it for you.
Many thanks,
:)
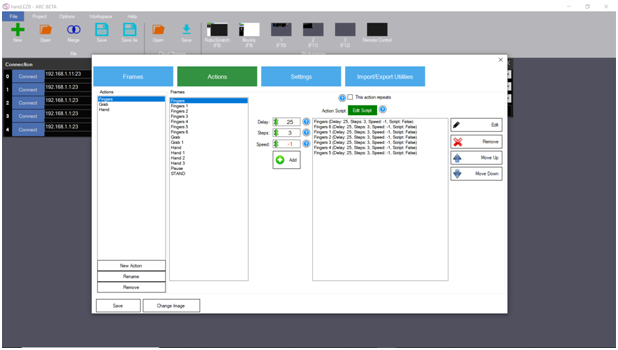
The delay is set to 1 for all frames in the action. As the question mark text reads, the delay is how long to delay between servo movements
1 ms is almost non existent delay. Set the delay to either the recommended default setting or something higher than 1. Much higher than 1.
Im pretty much repeating what’s in the help, question mark hover text, and video tutorials