PRO
rz90208
USA
Asked
— Edited
Auto Position Ezb1
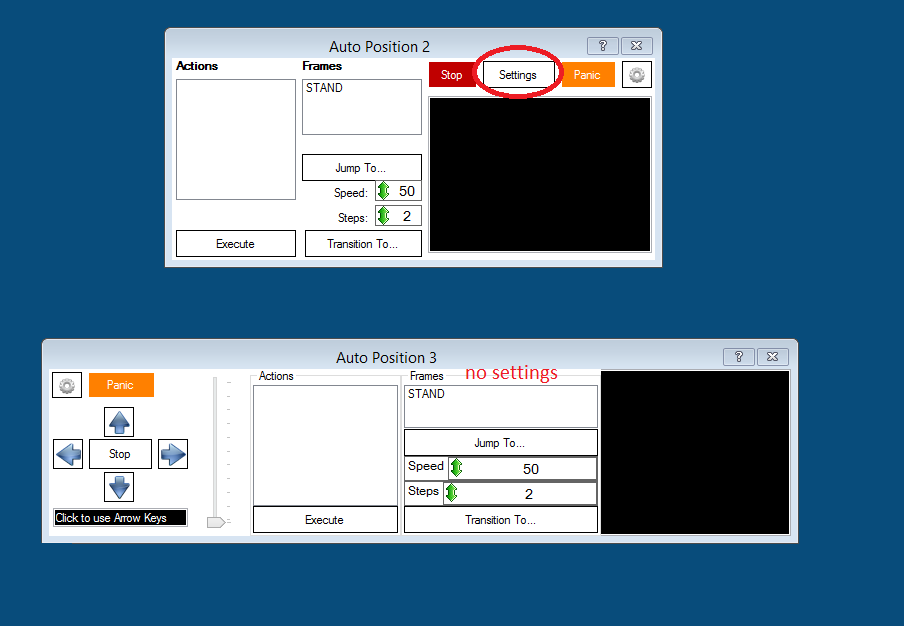
When setting up an Auto Position Frame, how do I select which EZB Controller?
RichardZ
 IFTTT Sender
— Send web-triggered IFTTT events from ARC/EZ-B: configure Maker Webhooks key and trigger applets to control SmartThings, WeMo and other services.
Try it →
IFTTT Sender
— Send web-triggered IFTTT events from ARC/EZ-B: configure Maker Webhooks key and trigger applets to control SmartThings, WeMo and other services.
Try it →
When setting up an Auto Position Frame, how do I select which EZB Controller?
RichardZ

The settings button on the front box.
So in a single frame, I can not change positions of servos on both EZB0 and EZB1. Rats, I will need to rethink my entire InMoov wiring. I currently have the right side of my InMoov on one EZB0 and the left on EZB1.
Thank you for the post Greg.
@DJ - Possible addition for a future release.
I don't think so. I am also doing a inmoov. Are you thinking 2 /4s?
I use a separate autopositioner for every ezb4 board I am using... This is how I manage this in my inMoov... I have 3 autopostioner controls. One for the main ezb4 and the other two for each of the 2 ioTinys I am using..
Did you use a iotiny for each arm and the /4 for the body? I have not decided on how to do power yet. Are you having any brownouts?
@Greg C Yes, I have an ioTiny in each arm and an exb4 for the rest... I do not have brown out issues due to my power setup... The main body servos run off of their own power connection. And I either use a 6v 50amp power supply or 2 6v SLA batteries depending on if he needs to be mobile or not...
@Greg, Yes, I am using 1- EZB4/2 and 1 - EZB4 (ports 11 - 23 don't work for some reason) So I have reconfigured so both arms, the eyes and the jaw are on the EZB4/2 and the rest on the first 12 ports of the EZB4.
@RichardR, One Auto Positioner for each board, that is my new plan also. Would be nice if we could use a $Variable in the Auto Positioner in place of the port number. I am trying to write my project so anyone with an InMoov could use it just by changing the configuration script.
Thanks all for your input.
RichardZ
Not really advocating this because I think it could end up with some herky-jerky movement, but you could build the AutoPosition to use all virtual ports (v1-v255) and then have a constantly running script or relative servo objects that make the real servos follow the position of the virtual servos.
Alan