
smiller29
We Are Getting Ready To Release Our Next Generation Open Source Robot The XR-2
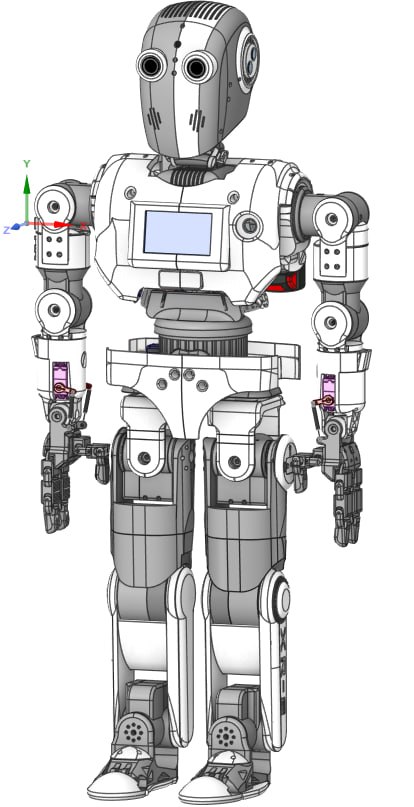
The XR-2 robot platform, available at Robots Builder, is designed with user-friendliness in mind, emphasizing accessibility and ease of assembly. Developed to make robotics more approachable, the XR-2 has been meticulously engineered for easy 3D printing and assembly using standard components like servos and bearings. This platform is a significantly updated version of the XR-1, which was released last year. We've addressed several weaknesses from the XR-1 and added many new features to enhance the XR-2.
The XR-2 supports two single-board computers (SBCs). It uses a PC mounted behind the display in the chest to support Synthiam ARC, allowing for seamless robot programming and control. Additionally, it has a designated space for mounting a Jetson Orin Nano just above the PC below the neck, which enhances its onboard AI server capabilities. On the back, there is a custom servo breakout board featuring two Mega Minis and USB ports. The power supply consists of two 20V power tool batteries. The robot boasts 49 degrees of freedom and supports two cameras. There is also space to accommodate up to 10 small Arduinos or sensors in each leg, allowing for extensive customization. Almost every joint in the robot uses bearings to relieve structural stress from the servos. However, it is important to note that the XR-2 is a relatively heavy robot.
Our commitment to simplifying the building process ensures that enthusiasts and robot hobbyists of all skill levels can engage in constructing their own robots. We've invested time in perfecting the design, ensuring that users can quickly transition to the exciting aspects of teaching and programming their robots. The XR-2 is highly customizable, featuring a variety of hands and heads to choose from, allowing users to personalize their creations. To foster a collaborative and open community, we're proud to announce that everything about the XR-2 is open source, inviting users to contribute, modify, and share their innovations with the global robotics community. Get ready to embark on a journey of creativity and exploration with the XR-2!
For more information, check out the following link in a few weeks as we will be updating the website with the new XR-2 files: Robots Builder

It will be out very soon the hold up has been the hands we just could not really come up with a good functional hand until now. We came up with a three finger hand that is very strong and functional.
You can see a video of it here https://www.youtube.com/shorts/zxcknRND4yU
Once the hand testing is complete we will open the website and post the project.
@smiller29
very nice robotic hand . i would still include that 5 fingerhand . people can choose witsh they want .
I may still be an option or just another stand alone project on the site I am sure the three finger hand is going to be it's own project. We may also have Heads for the XR2 and XJ5 and also an Arm & Hand project STL kits. For learning robots concepts. We will also have some AI software we made for the Jetson SCB for people that want to also be doing AI things outside of the cloud, so it is internal within the robot. This will work with ARC if you choose to use it but not required to make the robot work as ARC and the PC is all that is really needed. The goal was to create a platform that is flexible to the builder when it comes to software. We use only use hobby servos and Arduino's we did our best to keep it basic.
With that said the fastest way to see results will be using the ARC system.
Looks awesome, @smiller!
Before you publish the files, I wanted to bring up one consideration about the hand design. It may be worth incorporating some form of clutch or compliant coupling on the finger servos to prevent burnout when gripping objects. Since those servos don’t provide torque feedback, they’ll keep driving as they try to squeeze, which can over-stress and eventually damage them. We ran into this with the JD robot, which is why we added foam inserts to the grippers as a buffer.
There are a couple of approaches you could explore:
1. Magnetic clutch A magnetic slip clutch can protect the servo by letting it slip under excessive load. The downside is that slipping puts the fingers out of sync with the servo position. That said, if the fingers have a mechanical stop at the fully-open position, you can use that point to realign the finger position after a slip event.
2. Coil-style compliant coupler Another option is a coil coupler between the servo output shaft and the finger linkage. This could be 3D printed if there’s enough space to make it sturdy. The idea is that the inner part of the coil mounts to the servo shaft while the outer part attaches to the finger. The coil absorbs the stress when gripping, reducing the load the servo sees. It’s not as elastic as a magnetic clutch but still provides a safety buffer.
Oh here's a document about concepts: https://synthiam.com/Support/Advanced-Fundamentals/Finger-Mechanisms-For-Servo-Protection
@smiller29
it looks similar like the youbionic only there stl files are very expencive . heads for the xr2 and xj5 sounds very interesting love . lots of fun .
@DJ
protect the hobby servo's like this you mean ?
https://www.youtube.com/watch?v=Gui_GpMPmN0
smiller29 hand looks allot like thisone .
I think what DJ means is used by the pib robot. They use 7 servos, 6 for the fingers , 1 for wrist. kind of clutch to keep the pression on the finger without power the servo too much.
Thanks for the feedback. DJ we have included TPU pads with FRS touch sensors to the hand not shown in the video.
jp15sil24 we have done this on another version of hand and that concept worked well but we just could not get the rest of the hand to work well.
One of the issues is this robot is not a full size person so the scale is smaller which add many challenges because space and size are an issue. We are using 5k micro servos in the finished hand so they are stronger than MG90’s and the hands are also printed with PETG CF.
The other thing to note is the hand and wrist can be switched out with other hands. The controller is in the wrist and the servos connect to it and the wrist connects to the main PC by usb with power leads connecting to the robots power distribution system.
The goal is to be able to continue to design new heads and hands options. You can do something like I did to make the XJ5 a made a track base rather than legs and put the XR2 torso on it and created a new head but at its core it is a XR2. The platform provides options for builders. We are hoping to build a community like the InMoov builders around the world. We want to see people continue to build on to the platform.
Our other hope is that Synthiam joins in the effort and help us leverage ARC with these kits.