
smiller29
USA
Asked
— Edited

MRB1 (My Robot Buddy V1) Project
Welcome to my MRB1 (My Robot Buddy V1)
I have removed the post because it was corrupted somehow and all the pictures and formatting was lost.
This post needs to be deleted.

@Jeremie/Nomad 6R, thanks guys I have been getting notifications to anything I post to but that all. Jeremie what kind of printers do you have?
Yep, I get update email notifications for every thread I’ve ever commented on. I believe it’s a setting in your profile.
I have the access to the following printers:
Makerbot Replicator 2 Makerbot Replicator 5th Gen Makerbot Replicator+ 5th Gen Elegoo Neptune 2S
@Jeremie, Wow those are some really nice printers!!! You really must like this 3D printing stuff LOL. Well I can understand why you don't want to mess with your configuration. The only thing about PETG is that it is less apt to crack than PLA meaning it gives a little bit more than PLA and because you are fitting so many part together that are designed to fit tight you may have less issues with PETG. But with that said there are many people that build InMoov's in PLA.
In any case you have some great equipment and maybe some day, I will get one of those bad boys for myself if the wife will let me LOL.
I have to many hobbies that cost a lot of money... Ham Radio, RC, Computers, 3D printing, Precision shooting, Harley's, Jeeps and more....
....lol, it is fun having many hobbies for sure. Mine,,,, robotics, RC precision flying, 3d printing, Nscale trains, photography, model rockets.... just a few
I have been working on deciding if I want to use the Inmoov hand in my build or one of the following hand designs as a baseline.
Parloma Hand v1.0 beta 2
This hand is able to support the most gestures of everything I looked at and is designed to work with Inmoov it adds three more micro servos to each hand.
Or HANDi Hand Project where I have access to all the development files on GitHub https://github.com/blincdev/HANDi-Hand#handi-hand
The biggest issue with this design is the servos (HITEC HS 35-HD) used in this design are no longer made so it needs to be modified to support HITEC HS 40 nano servo's that are slightly bigger. Based on my first test I think they will work. what is cool about this hand is it uses zip ties connected to the servos to open and close the fingers and thumb. The other nice thing is it puts everything in the hand and it is also designed for presser sensors in the fingers tips.
If I use this I will be making the design a lot less complex. My issue is I am still new to Fusion 360 so making the changes is going to take me some time.
I would love to here your comments.
Having the servos in the hand will make it heavier though. I don't know what servos you are using everywhere. You may not be changing the weight of the finger servos themselves. However, keep in mind that moving weight from a spot closer to the elbow out towards the end of the arm makes a difference. More so when the arm is moving. Will your shoulder and elbow servos be able to lift the extra weight?
Edit: I did take a look at the finger servos your going to use. They are so tiny that the added weight at the end of the fulcrum probably wont matter. Just something to keep in mind when designing something like this.
Dave Thanks for the feedback the servos I am looking at are Hitec HS-40 nano servos that our 0.17 oz (4.8g) so they are very light and should not be an issue. But to use them I need to redesign the mount of them in the hand because they are just a little bit different the the HS-35's that got used in the design. My issue is I am still not proficient using Fusion 360 so making the changes is going to require me to learn how to do it unless a member here can help with that effort. We have all the STEP files for every part of the hand and I also have the STEP file for the HS-40 servo. Just need some help making the changes.
The below part is one that needs to be modified
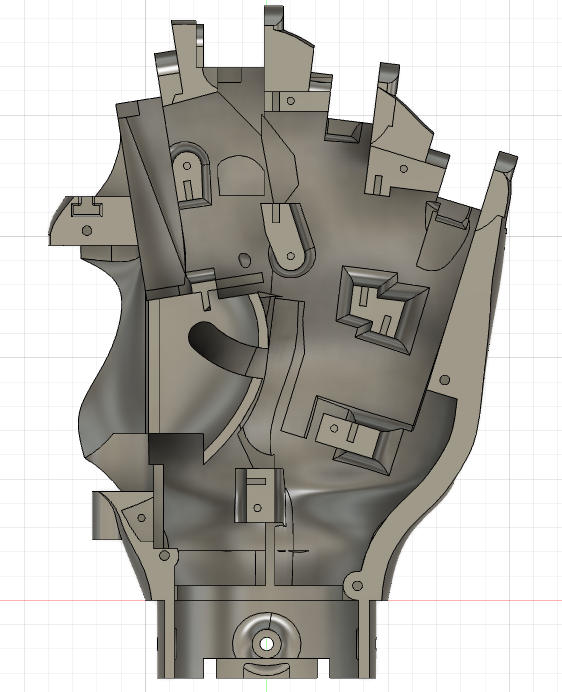
Below shows the HS-40 servo in the hand after my changes to the above part. I still need to make some changes to the thumb to support the HS-40 but I don't think that is going to be an issue. Now I need to order some servos and see if I can make these hands work on the Inmoov. If they do then I want to see if I can make the forearm rotate 180 degrees so I can work to change the wrist to just wave without rotating. I am sure it will be a while before I get to that point.I also talked to the guys working on the Handi-Hand project and they are also working on a new design using other servos they hope to have ready in the fall so depending on how that goes I may pivot again...
smiller29
are these not good ?
hs-40-nano-nylon-gear-servo
or
hs 35 hitec