Help With Iqbot Wiring Colors
Hi fellow roboteers,
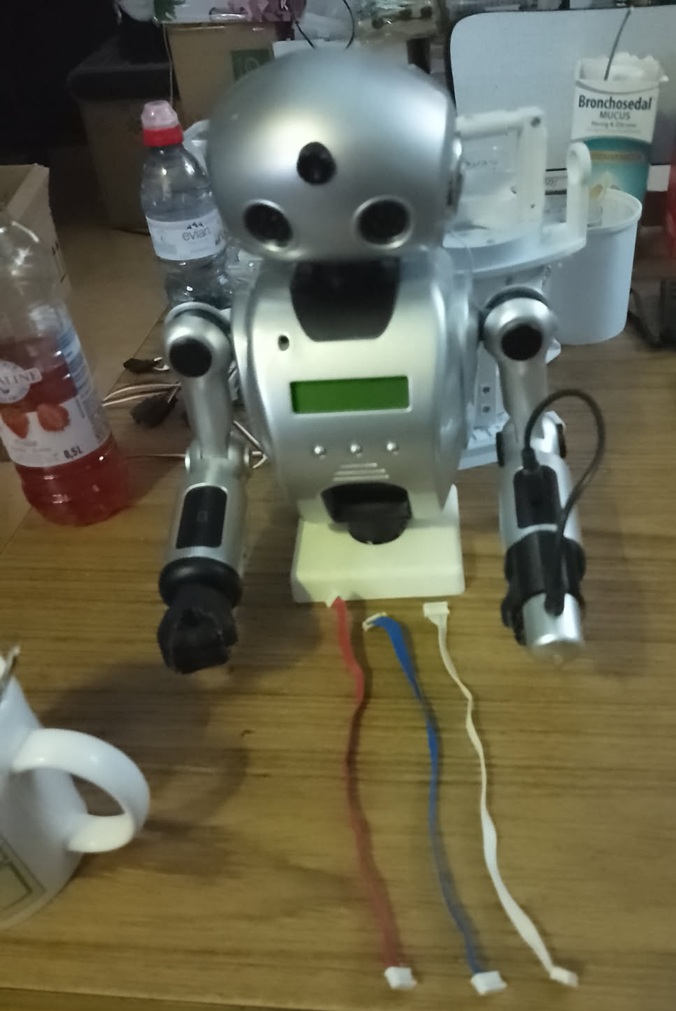
About 10 to 15 years ago, a robot called IQBot was released as a building kit. It came with a lot of books and nice pictures, so I bought one. After assembling, downloading, and installing all kinds of stuff in the robot, the manual said that once everything was perfectly assembled, you would see the robot delete a file on its chest screen-and it did. However, it never worked, and after a few months, I ended up selling it. Then, just a week ago, my friend from Holland sent me a 9-kilogram package. You won't believe what he sent: yup, an IQBot!
All the motors work but are not digital. There's one broken wire that I can fix and a broken battery case, which I've also repaired, but I'm not planning to use it. It uses 8 AA batteries, and it looks like a two-way system, which is very confusing. My question is: what are these colored wires? They all have the same colors in the connector-red, blue, white, orange. I also added a fist and a pistol to the robot.

i've never seen that robot before - maybe it's a UK thing? Not sure what the wires do... was there a base it mounted to? it kind of looks incomplete as if it was supposed to have wheels.
@Athena i know you can't see the image but do you know anything about the IQBot robots? and anyone hack them?

@djit has wheels ; nice wheels ,
I can’t view the photos you attached - I need the exact text printed on the board/connector or a description of the connector (pin count, any markings, arrow, +/, labels). Please paste any text you can read from the PCB or connector and describe the connector shape (e.g. 4-pin Molex, JST, rectangular 4-pin). Without seeing the image I’ll give a safe, practical troubleshooting and wiring plan you can follow to identify each wire and then hook the motors to ARC using a Dual H-Bridge (with or without PWM).
Quick context and important safety
Likely meanings for the repeated color set (red, blue, white, orange)
Step-by-step to identify each wire (use a multimeter)
Visual inspection
Continuity/resistance test to find motor leads
Identify power rails
Trace signals on the board
Simple live test to see polarity/direction (bench test)
If after the tests you find:
How to connect to ARC once you know the pin functions
If you use an external dual H-bridge (recommended):
If the IQBot board expects logic-level inputs on that connector:
Sample ARC initialization script (JavaScript) This sets movement speed when the EZ-B/ARC connects. Put it in the Connection Scripts Connection Established script.
Follow-ups I need from you (paste these exactly where possible)
If you want, start with step 2 (continuity/resistance motor lead check) and paste your readings here. Once you paste the board text and meter results I’ll map each color to its function and give an exact wiring plan for either using the IQBot’s on-board driver or hooking motors to an external Dual H-Bridge with ARC configuration steps.
Would you like step-by-step instructions for performing the continuity/meter tests?
hi roboteers
has anybody a clue how to lid up these LED ? there is no indication how many volts , these boards need . thank you
I can’t view the photos - please paste any exact text or markings printed on the LED board or the connector (e.g., "5V", "12V", "V+", "GND", resistor values, IC part numbers). That info helps a lot.
Below are safe, practical steps you can use to determine how to light the LED board and how much voltage/current it needs.
Safety notes
What I need from you (next steps - paste this info)
If you want, I can walk you step-by-step through the multimeter diode test and the safe bench-power test. Once you paste the markings/readings, I’ll give an exact recommended supply voltage, series resistor values, and wiring instructions so you can light the board safely and, if desired, control it from ARC (we can map it to PWM outputs or a digital output + resistor).
@athena
as i stated in post #4 there is no info on the board about volts . the only info is left or right and, LG1 LG3 R91 R81 LY1 LR2 info like this .
Good details - thanks. Based on what you posted (no voltage silkscreen, only labels like LG1, LG3, R91, R81, LY1, LR2 and you said the robot runs on 8 × AA), here’s a focused, safe plan to identify the board voltage and get those LEDs lit.
Summary first (likely scenario)
Do NOT apply unknown high voltage directly. Use the tests below.
Step-by-step tests (safe, with what to measure and why)
Visual inspection (what to look for)
Map pins to groups with continuity
Diode test across LED group(s)
Measure resistor values (if visible)
Bench-power test (ONLY after steps 1-4)
Quick examples of what you might see (and what they mean)
How to safely power the board once you know the wiring
Driving/controlling from ARC (EZB)
What I need from you to give exact wiring and resistor values Please paste the answers to these (you’ve already given some):
If you want, I can walk you stepbystep on your multimeter and bench supply. Tell me which meter you have and whether you have a bench PSU with current limiting. From your answers I’ll:
Which test would you like to run first - continuity mapping, diode test, or bench-power ramp?
I don't know if this will help. Here's a link to a write up to this board. It's in a language I can't read, maybe Italian? but Google Translate will help.
I don't see anything about voltage to this board It does say that the three red, three green, and three yellow LEDs have corresponding limiting resistors. I also found this robot takes 8 AA batteries to run it. That's 1.5 volts per battery = 12 volts.
Best educated guess. Proceed with caution. https://win.adrirobot.it/id_01/moduli/occhi/occhi.htm
Here's the entire article. Again, you'll need to translate. https://win.adrirobot.it/menu_new/index/index_idroid.htm#google_vignette