ed_eilers
Netherlands
Asked
— Edited
I would like to get some help on serial bus servo's that use almost the same protocol as dynamixel.
BUT all the dynamixel instruction packets and status packets start with:
0xFF 0xFF and then you get ID> Length> Instruction>Parameters>Checksum
like this
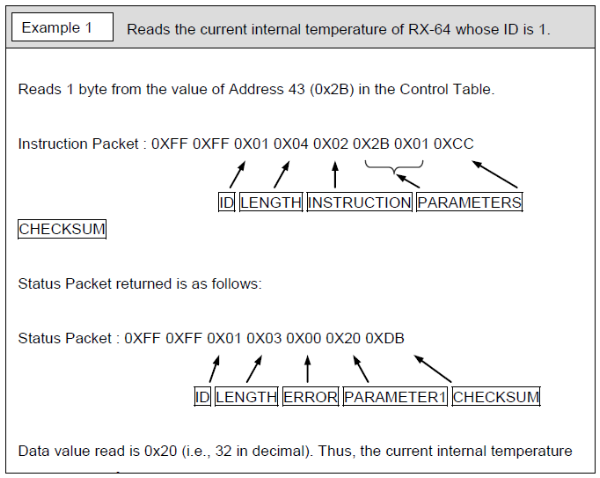
The servo's I want to use are Lobot LX-16A that use the same protocol with one difference: the packets start with 0x55 0x55 and then ID> Length> Instruction>Parameters>Checksum
so my servo's don't react on the dynamixelplugin How can I or someone change the 0xff too 0x55 in the plugin? Is it possible too get the source code for the plugin? or is there another solution? I can't afford real dynamixels and this seemed a good alternative
thanx in advance for your help

Hmm, the plugin description indicates it is open source, so you should be able to modify it, but if there is a link to the source code, I am missing it (other open source plugins have a link in the description).
@DJ is this one open source and am I right that the link is missing?
Alan
Get the source code here: https://synthiam.com/redirect/legacy?table=plugin&id=39
Thank you for this fast response techguru and dj Sures
I hope that I can get this to work will take some time but if I got it working i will post it for other people too use.
I think these are nice servo's and it will open some new possibilities for my Ez robot Can tell you that I'm very happy with Ez robot and the effort that is put in it.
thanks guys
Thanks for the kind words :)
I picked up some LX-16A nice servos, lots of torque. There is a directory here with the program and PDF's
https://www.dropbox.com/sh/b3v81sb9nwir16q/AACkK-tg0q39fKJZcSl-YrqOa/LX-16A%20Bus%20Servo?dl=0
The communication protocol is fairly well documented https://www.dropbox.com/sh/b3v81sb9nwir16q/AACkK-tg0q39fKJZcSl-YrqOa/LX-16A%20Bus%20Servo?dl=0&preview=LewanSoul+Bus+Servo+Communication+Protocol.pdf
haven't managed to get to work with EZB yet. Tried the dynamixel plugin but no luck as per above it initialized with 0x55 not 0xFF
I opened source to change to 0X55 but two pages of errors in visual studio ... I think I will go play with the UART
Errors if you opened the plugin because it’s not configured for the ARC and ezb dll resources for your installation. It’ll be different for every computer.
Follow the tutorial on creating a plugin to familiarize yourself with visual studio and programming. It’s fun, even if it takes a while!
Not sure if i got the packet correct, but you can give this a shot: https://synthiam.com/redirect/legacy?table=plugin&id=252
I ordered a servo to test with.
Thanks DJ - lights are on but :-) I guess 0x55 was not the only difference or I am doing something wrong.
These servo's are great the normal servo's also the ez-robot ones (sorry) are not ok I keep burning them. And these have feedback and al lot more options like the very expensive dynamixels it would be great if we could get them to work with ez-robot.
Now I use ez-robot to generate the commando's as a virtual servo them send the value and id serial to a arduino that translates it to the right protocol and that goes serial to the interface and that controles the servo.
stil having trouble to send and the servo value and the id from ez-robot to arduino in a good way as i can't figure out how to do this in the scripting language
the visualbasic did not work for me also errors and sleepless nights :)
Glad more people picked this up and maby DJ can add this servo to EZ-Robot because it opens a hole lot of new possibilyties to EZ-Robot
Greetings ED
@Nick did you use the interface ? Or did you connected the servo directly? think you need too use the interface. i will test it tonight
I tried direct and via controller
I would not be to sure about quality of lewansoul though they say they are up to 8v and can run off a 2s lipo but turns out motor according to this thread is 4.5v I quickly threw a voltage regulator on to be safe. http://forums.trossenrobotics.com/showthread.php?14684-Lewansoul-LX-16A-bus-servo
@Ed, you have never used the ezrobot HDD servos. If you were burning out Ezrobot HDD servos, id be curious of HOW? But you’re not so it’s okay :)
These are the HDD servos, @Ed...
@Nink, I don’t have faith in those LewanSoul servos either... there’s only two servo brands I trust: ezrobot HDD’s and DYNAMIXEL. Anything else is a waste of dollars.
Time and time again I watch people on here try to save a buck by purchasing eBay and poorly made cheap servos. It ends up costing the user more because they end up having to purchase proper servos - or they abandon the project all together...
By supporting these poorly manufactured cheap servos in a plugin, ezrobot is not supporting or endorsing these fire hazards. My only initiative to support these servos is because enough community members have asked for support. And that’s what ezrobot does, whether we agree or not :)
@Nink - what do you mean "You tried with the controller"?
Are you referring to the plugin? The servos would connect directly to the EZ-B via the specified UART in the config of the plugin. I recommend using the hardware UART and not software (unless it's an IoTiny)
Hey DJ
They give you a little protocol converter controller. So you go EZB D5=>Controller=>LewanSoul
I tried D5 to LewanSoul direct as well
https://www.amazon.com/LewanSoul-BusLinker-Debug-Board-LX-16A/dp/B073WRLJB2
The plugin I created is for the servo, not a protocol converter controller. The plugin will not work if the ezb is not connected to a Servo.
OK the only way I can get it to work on Arduino is if I go arduino TX to Controller RX at 115200 and then the controller talks to servos. If I get time I will translate arduino code to EZscript
@DJ The servo's were the old ones not the HDD ones your correct.
I made an update to the checksum code in the plugin. Far as I can tell, it follows the datasheet 100%. Here's the latest plugin update: https://synthiam.com/redirect/legacy?table=plugin&id=252
Also, there's a bunch of reference to using the USB/TTL Debug servo Board. Which I cannot seem to find any documentation of - specifically no communication protocol documentation. Unless it uses the same communication protocol as the servos, in which case it "should" work.
I’ve ordered a few of these to test with. Thanks for adding another servo option!
@DJ, can you add the source code the download plugin page? Thanks.
I am trying the plugin to get to work, a warning if you connect to the uart do not connect VCC only TX RX and GND maybe I am wrong but i have fried a EZ-B v4 already.
I wil send later some pictures and a link with al the info i have got plus the arduino code that drives these servo's via the interface with is needed to make it work.
thanks for the effort so far
Yes - you cannot power a motor off the uart, silly goose :)
Regulated power in the ezb is absolutely NOT for motors or high current. There’s an amperage limit in the datasheet. Make sure you check the datasheet when building a custom robot.
I keep my common datasheets printed and taped to my wall for quick reference. Here’s the ezb datasheet: https://synthiam.com/Tutorials/Lesson/18
Regarding the Arduino setup - are you connecting the servos directly to the Arduino or using the usb/ttl board? I’m confused by this magical usb board because it’s referenced in their documentation and nink mentioned it as well. Maybe the plugin should be communicating with that board instead?
@DJ No I'm not that retarded well sometimes but no what I did was power the interface board and the EZ-B from the battery 7,4 volts so that drives the servo's and connected the hardware UART vcc from the EZ-B to the UART interface VCC plus TX RX and GND and that did killed my EZ-B stress.
I have been trying to get the plugin to work but On the hardware UART no joy and software UART TX->RX also nothing happens, the thing what i could not get right in EZ-B script was the adressing of the low and high byte:
#define GET_LOW_BYTE(A) (uint8_t)((A)) //Macro function get lower 8 bits of A #define GET_HIGH_BYTE(A) (uint8_t)((A) >> 8) //Macro function get higher 8 bits of A #define BYTE_TO_HW(A, B) ((((uint16_t)(A)) << 8) | (uint8_t)(B)) //put A as higher 8 bits B as lower 8 bits which amalgamated into 16 bits integer
#define LOBOT_SERVO_FRAME_HEADER 0x55 #define LOBOT_SERVO_MOVE_TIME_WRITE 1 #define LOBOT_SERVO_MOVE_TIME_READ 2 #define LOBOT_SERVO_MOVE_TIME_WAIT_WRITE 7 #define LOBOT_SERVO_MOVE_TIME_WAIT_READ 8 #define LOBOT_SERVO_MOVE_START 11 #define LOBOT_SERVO_MOVE_STOP 12 #define LOBOT_SERVO_ID_WRITE 13 #define LOBOT_SERVO_ID_READ 14 #define LOBOT_SERVO_ANGLE_OFFSET_ADJUST 17 #define LOBOT_SERVO_ANGLE_OFFSET_WRITE 18 #define LOBOT_SERVO_ANGLE_OFFSET_READ 19 #define LOBOT_SERVO_ANGLE_LIMIT_WRITE 20 #define LOBOT_SERVO_ANGLE_LIMIT_READ 21 #define LOBOT_SERVO_VIN_LIMIT_WRITE 22 #define LOBOT_SERVO_VIN_LIMIT_READ 23 #define LOBOT_SERVO_TEMP_MAX_LIMIT_WRITE 24 #define LOBOT_SERVO_TEMP_MAX_LIMIT_READ 25 #define LOBOT_SERVO_TEMP_READ 26 #define LOBOT_SERVO_VIN_READ 27 #define LOBOT_SERVO_POS_READ 28 #define LOBOT_SERVO_OR_MOTOR_MODE_WRITE 29 #define LOBOT_SERVO_OR_MOTOR_MODE_READ 30 #define LOBOT_SERVO_LOAD_OR_UNLOAD_WRITE 31 #define LOBOT_SERVO_LOAD_OR_UNLOAD_READ 32 #define LOBOT_SERVO_LED_CTRL_WRITE 33 #define LOBOT_SERVO_LED_CTRL_READ 34 #define LOBOT_SERVO_LED_ERROR_WRITE 35 #define LOBOT_SERVO_LED_ERROR_READ 36
//#define LOBOT_DEBUG 1 /Debug ï¼print debug value/
byte LobotCheckSum(byte buf[]) { byte i; uint16_t temp = 0; for (i = 2; i < buf[3] + 2; i++) { temp += buf[i]; } temp = ~temp; i = (byte)temp; return i; }
void LobotSerialServoMove(HardwareSerial &SerialX, uint8_t id, int16_t position, uint16_t time) { byte buf[10]; if(position < 0) position = 0; if(position > 1000) position = 1000; buf[0] = buf[1] = LOBOT_SERVO_FRAME_HEADER; buf[2] = id; buf[3] = 7; buf[4] = LOBOT_SERVO_MOVE_TIME_WRITE; buf[5] = GET_LOW_BYTE(position); buf[6] = GET_HIGH_BYTE(position); buf[7] = GET_LOW_BYTE(time); buf[8] = GET_HIGH_BYTE(time); buf[9] = LobotCheckSum(buf); SerialX.write(buf, 10); }
void setup() { // put your setup code here, to run once: Serial.begin(115200); delay(1000); }
#define ID1 1 #define ID2 2
void loop() { // put your main code here, to run repeatedly: LobotSerialServoMove(Serial, ID1, 100, 500); LobotSerialServoMove(Serial, ID2, 500, 500); delay(1000); LobotSerialServoMove(Serial, ID1, 500, 500); LobotSerialServoMove(Serial, ID2, 600, 500); delay(1000); LobotSerialServoMove(Serial, ID1, 900, 500); LobotSerialServoMove(Serial, ID2, 700, 500); delay(1000); LobotSerialServoMove(Serial, ID1, 500, 500); LobotSerialServoMove(Serial, ID2, 600, 500); delay(1000); }
So the value that you put in these lines:
LobotSerialServoMove(Serial, ID1, 100here, 500); LobotSerialServoMove(Serial, ID2, 500here, 500);
will make the servo move from 0-1000 0 deg to 240 deg the id is the servo you want to move and the last value is the speed
In this piece the actual protocol is been send :
void LobotSerialServoMove(HardwareSerial &SerialX, uint8_t id, int16_t position, uint16_t time) { byte buf[10]; if(position < 0) position = 0; if(position > 1000) position = 1000; buf[0] = buf[1] = LOBOT_SERVO_FRAME_HEADER; buf[2] = id; buf[3] = 7; buf[4] = LOBOT_SERVO_MOVE_TIME_WRITE; buf[5] = GET_LOW_BYTE(position); buf[6] = GET_HIGH_BYTE(position); buf[7] = GET_LOW_BYTE(time); buf[8] = GET_HIGH_BYTE(time); buf[9] = LobotCheckSum(buf); SerialX.write(buf, 10); }
Okay let me take a look at their code and compare it to what I’m doing. I’ll look tonight as I’m on a plane right now.
But to get the low byte, in any language supporting binary operation, you’d do this...
$lowbyte = $value & 0xff
And high byte would be...
$highbyte = ($value << 8) & 0xff
And these are the parameters it needs:
void LobotSerialServoMove(HardwareSerial &SerialX, uint8_t id, int16_t position, uint16_t time)
so (0x55&0x55,ID,movement value 0-1000, servo speed 0-500)
movement value is 16 bits, first low 8 bits and high 8 bits speed value is only the high 8 bits
but i could not in EZ-Script separate 16 bits in to low 8 and high 8
thanks this piece off info gave me some sleepless nights haha
you are my hero DJ Hope that you get the plugin to work thanks
Their schematic shows A 74HC126 line driver. https://assets.nexperia.com/documents/data-sheet/74HC_HCT126_Q100.pdf It appears you can only communicate to their servos using this circuit. The Lewan Soul servo's I have been testing I put on the bench and exercised overnight and they are now both hot and grinding at 6.7v no load.
I like the idea of servo's with feedback as we really need a way to teach robots through copying and replaying human movements. This is essential when learning and performing human task and training fine motor skills. I also like the ability to extract sensor data (motion, position, speed, temperature, torque...) to build models and predict failures. Unfortunately I suspect that predicting future failures in these particular servos maybe a lost cause (But I will persist).
https://www.dropbox.com/sh/b3v81sb9nwir16q/AACkK-tg0q39fKJZcSl-YrqOa/LX-16A%20Bus%20Servo?dl=0&preview=LewanSoul+Bus+Servo+Communication+Protocol.pdf
Wow. That’s disappointing but not surprising, considering the price ($14.99). That’s a very short life span.
I still believe in this servo even I did not fry it I have made some sort of a plan how to i think it has to be inplemented in EZscript and maby someone that's good with the EZscript can translate this:
program steps
Get servo ID from EZ-B Get wanted servo angle from EZ-B Translate 0-180 to 0-1000 Translate decimal value servo angle to hex separate hex value into low bits and high bits: ( 500 dec = 0x1F4, low = 244 dec is 0xf4, 256 dec = 0x100 or high 0x01) Send the 10 byte word to uart 10byte word is: [0] 0x55 hardware id1 [1] 0x55 hardware id2 [2] 0x00 Vn the servo that has to move now V0 [3} 0x07 don't know this one but is 7 [4] 0x01 command that tells the servo it has to move [5} 0xF4 low byte servo movement [6] 0x01 high byte servo movement [7] 0xF4 low byte servo speed speed=500 [8] 0x01 high byte servo speed speed=500 [9] checksum of some sort see below start over again
checksum in arduino:
{ byte i; uint16_t temp = 0; for (i = 2; i < buf[3] + 2; i++) { temp += buf[i]; } temp = ~temp; i = (byte)temp; return i; }
so hope someone gets this
I’ll be taking a look at this servo when ours arrives at the calgary office. I fly back to calgary later this week and it arrives next week (I think).
Wait....
Holding breath
There you go...
You are amazing DJ. And thanks so another option...if even for a cheap Chinese Dynamixel knock off servo ! I can hear the cheapness! Dynamixels do not sound like that!
I can hear the cheapness! Dynamixels do not sound like that!
Ya it’s a pretty terrible servo. I wouldn’t use one.
Wow cool. Curious how you managed to set ID without a debug board. Any idea how to read current position of servo ?
Thanks.
Unfortunately, I’ll not be puting more effort into this cheap servos.
You can’t read position with the plugin. Use Auto Position and create the frames, which is more reliable anyway.
I didn’t set the servo id. I used the Id that the servo came with (default 1). Use their usb uart board and utlility to set the id.
There will be no further development on this servo. It’s barely worth supporting after experiencing it. Kind of upset if it’s poor quality, specially when the ezrobot HDD servos are ten times the quality and reliability for lower cost.
Have fun!
Hey @DJ. I appreciate the effort. I blew $100 on 5 Servos and a controller. They don’t even have mounting brackets on thingiverse for them. I live in hopes of finding a high quality dynamixel equivalent without robotis over inflated prices.
in other news. For sale 4 working Servos and one burnt out servo and a UART controller. Fully compatable with EZ-Robot and EZB
Is anyone using these servos? Since i updated ARC to now support reading from bi-directional smart servos, i was wondering if i should update the lewansoul plugin to support it as well?
I thought about a Mod one of these would be good. https://www.youtube.com/watch?v=Wgx9B8M3uNM
You can buy the H3S (similar to H3P without the controller or sensors etc just frame and servos ) for ~$350 CAD from China on eBay. Just add iotiny Battery and some sensor is my logic but i don’t own one yet. I would buy if the LD 2015 and LD 2701 lewansoul worked.
MeccaNoid servos would also be good.
The only down fall to the IoTiny is it can’t read servo positions due to lack of hardware users. There’s only two and one is used for camera and other for audio
But that’s a great robot price for the number of servos. You’ll have to hack a power house EZ-B v4 to it
@DJ if you are looking into other smart servos, I've looked into HurkuleX from DST Robot (formerly Dongbu Robot). They have 4 different series and the 060X series carry super high resolution at 12960/360 degrees resolution. I think some of these are comparable to Dynamixels. Pricing falls somewhere in the middle.
http://www.dongburobot.com/jsp/cms/view.jsp?code=100782
I dunno if i trust that company - they haven't paid for an SSL certificate for almost 2 years.
The Robotshop carries their stock, so someone is communicating and ordering from them. Somewhat legit.
Just a suggestion. They are pretty impressive and are TTL...
Understandable... a little shady is all < yeah
< yeah
Cautious, is always a better way to proceed.........!!!
Been looking into these servos a bit more in depth. They have an enormous amount of torque which i like for some of my upcoming big projects. Another thing I like is they have a programmable ease in and ease out, which is great for natural motion.
It looks like there are 4 wires power, ground, and tx/rx. I'm going to order one of their servos and the programmer and do some dynamixel comparisons.
As always the manual is lacking...like there is no manual at all, so will have to test some of the other features on their programmer to better understand their function.
Hhhhhhmmmmm....now I am not so sure anymore about those LewanSoul LX-16A anymore! I have been thinking of changing my servo setup to a Daisychainable servo with positional feedback... But when I see how bad you guys talk about them, I might wait for a better option yet to be discovered?
Any thoughts on this? :)
The LewanSoul and the HerculeX are both listed as being an option to using Dynamixel Servos, so I was having my hopes up high when I saw the implementation of the LewanSoul servo here!!
https://hackaday.com/2018/07/05/wrangling-rc-servos-becoming-a-hassle-try-serial-bus-servos/
I also would not mind to spend money on getting Dynamixel Servos...are those little hobby ones any good? :)
https://www.trossenrobotics.com/dynamixel-xl-320-robot-actuator
I also would not mind to spend money on getting Dynamixel Servos...are those little hobby ones any good? :)
[color=#111111][size=3][font=Verdana, Arial, Helvetica, sans-serif]https://www.trossenrobotics.com/dynamixel-xl-320-robot-actuator[/font][/size][/color]
They work great. They are quiet and have feedback for $49 usd. Only drawback Is they are a bit slower and less torque (at about 14 kg/cm ) than the ez robot hdd servo.
I'm surprised to hear they are that much less powerful than the HDD servos. Makes a lot of sense because when i was using the Bioloid in one of my live hacks, the legs didn't seem to have much "juice" and the servo would reset.
Yup very disappointed in power and speed.
So which Serial Bus servo would you guys recommend...changing the servo setup is quiet a pain, so I have been rolling it back and forth in my head for a while. This discussion kind of sparked the idea again! Running those on a Raspberry Pi is still not very well documented, and I am kind of glad having everything pieced together and working, that is why I delayed it always for later! :D
But now with ARC and Dynamixel Support running on the Raspi, that is quiet a game changer for me! But obviously I would also want to use Python to control my servos, since I am always tinkering, and sometimes it is not ARC related!
If you guys have any recommendations, I would be happy to get the same brand...makes progress a lot faster if stuff is unified I figure!! :)
@fxrtst Why are you researching the other serial bus servos while having Alan already wired up with those Dynamixels? Is it just curiosity or are you looking for the best possible option for your product, having in mind that you might have to purchase a huge quantity at some point? I guess by the time Alan and Alena will be ready for the market, you will get a company to produce your own brand like @DJSures does?
Would you mind to share how you wired up the Dynamixels? I guess I will burden myself with hours of remodeling my robot, and spend quiet some money...but now I got it stuck to my mind, and I am willing to give serial bus servos a try! :D
The things that kept me from it so far was, its not really well documented for the Raspberry Pi...there is the option to purchase hardware that should get the job done, but I am afraid to purchase something that will proof useless in the end!
What I found was the following
https://www.trossenrobotics.com/open-cm-904c
or these two USB connected products
https://www.trossenrobotics.com/usb2ax https://www.trossenrobotics.com/dynamixel-u2d2.aspx
Any hints on which route I should go... :)
They other thing that kind of annoyed me is, that at the moment all the boards and servos are running on 5Volts, so I would have to get a new power supply, I was thinking of some power supply with different fixed Voltages...like the ones you put into a PC?
But all in all this would mean, I will basically on the way to rebuild my robot completely!!
So I could also spend that time trying to get my Unity App working better, rather than just putting a lot of effort into having better servos...while the functionality of it basically stays the same?
What are your thoughts on this?
There are several reasons for walking down the path of other servo that run on serial bus. I like the idea of tidy cable management. Dynamixels rock, but good to have other options. If I understand what Synthiam is about..its getting together alot of hardware items to work with EZ hardware. So, it just makes since to try some of the other products.
Dynamixels are easy to set up. Just make sure you get the TTL versions. The motors have T at the end of their nomenclatures. You are correct the voltages vary per product but can go as high as 14 volts for some bigger ones.. The ideal voltage is 11.1 which is what i run all my robots on. So that might be an issue for you or for the battery pack location etc.
You don't need another control board for them (as you linked to trossen) the EZB does it all.....I usually make a separate voltage for the servos and just output the signal wires to the ezb and share a ground wire. Connect the first servo to D5 and you are on your way.There is a bit to do inside the plug in to get the servos to work. That includes changing the Ids (easy) baud rate and activating the port.
If you choose to do that then I can make you a real quick video on how to set up just one servo youll understand how to set up the others from there.
I'm all up for you working on the unity app. Its something I want to revisit soon. Getting a version working with ARC/synthiam is a must so we can use sensors etc with the servos.
Always do what cost the least..lol.....
The dynamixel -or- LewanSoul servos connect to the Raspberry Pi's serial port, and are moved with the EZBPi Server - and ARC. ARC can either be on the Pi itself, or on a remote machine. Either way, you need the EZBPi Server on the Pi for them to work.
It's actually really easy to control those servos with the Pi using ARC and EZBPi: https://synthiam.com/Hardware/Hardware/Raspberry-Pi-17681
So which Dynamixel Servos would you guys recommend? I heard that the DYNAMIXEL AX-12A is the most favored servo for robotics?
And yes, cable management is a reason, plus getting feedback on servo position is something that is a very cool feature!!
I am happy to hear that you do not need any additional hardware to get them running... So I might give it a try with my EZ-Bs!!
But connecting them straight to the Raspi is not possible? @DJ Sures, you said something about turning the Raspberry Pi into an EZ-B...so that would mean I could get the Dynamixels to work straight out of the box?
Most information I found was at least having to deal with building a small circuit system to get things working out!
I would like to drive the servos with ARC and also with my Python applications if possible!
Well if I read the info right...it is possible to connect them straight to the Raspberry Pi, too good to be true!!
So sad I cannot join in for the stream!! Gotta go to bed now!!
Yeah you gotta catch up on Djs streams ...he had stuff running on the PI. So cool to see ARC running on all these controllers!
You gotta get on our time so we can chat live! Remember you can sleep when you are dead!
Hahaha so true!!! But my brain is already somewhere far beyond being capable of comprehending any tech stuff...might just pop by to say hello!! If I manage to stay awake!!
ARC on the Pi is a milestone!!
Thanks for bringing up Unity too...that was another one!!
Soon we will piece it all together!! :D
Hey guys...still wrapping my mind around serial bus servos! :)
So one thing I figured is that I would be buying a PC Power supply to have multiple high amp power outs... Am I correct on that, or how are you dealing with this is issue?
And secondly, I was trying to figure out cable management. So given that those servos would be wired to an EZB or Raspberry Pi directly, you could daisychain them. But it would also mean that you'd have to run them down one arm/leg to the hands/feet, and then back again to the torso, to start stringing up the other limb? Am I wrong here? The EZB/Raspi only connect to the first servo, no second connection is possible right?
So would this mean that given the scenario of a robot driven by serial bus servos, some kind of controller board would be necessary, if you would not want to end up having a very messy cable management...
I ordered some LewanSoul Servos, sincce they seem to run on 5V and I dont burn a lot of money in case I break them! First try on serial bus servos, so lets see if I will be able to produce some magic smoke!! :D
So I caught up on the Live Hacks now, and am getting a better understanding on how this all works...still got a good amount of learning how to utilize this, but it is super interesting!! I am happy that I checked the archived Live Hacks!! Will dig thru them more in the next few days!
BTW, i didn't download the file link for the unity project you had listed. I clicked to view it on my phone but when i went to use my laptop, it was gone.
@DjSures I thought you already downloaded the scene...we are currently debugging the issue! I hope after this weekend it will be all working fine, that'll safe you the time having to mess with it!! If the problems are reoccurring I will repost! It would be kind of better to not have the download link public though!! :)
It shouldn't be an issue that requires debugging. It's such a simple process. Set the servo positions, send the packet. It's real real real real easy :). Why dont you want it public if you're asking for help? If you want people to help, they have to see it. Otherwise, what's the advantage of someone helping if they can't learn from it as well?
Seriously, just set the servo positions and send the packet. It's real real real simple - it can't be any easier than it is. Perhaps you're attempting to send the packet from multiple threads? That won't work. You can only have one client transmit the servo position packet.
Within this scene a paid plugin is included, and I do not want to harm the maker by posting the download link public...even though he seems to be pretty relaxed about it!!
I put the whole thing to GitHub back in the days, when we were still developing, and took it down for that exact reason!! :)
Also while researching about serial bus servos, I found that a lot of wiring also includes an inegrated circuit...mostly a 74LS241N. Would you also recommend utilizing it? I am still doing research on the whole topic, so I might be off...just taking guesses here! My LX-16A will take a month for shipping, I did not py attention and ordered them from China!!! :D
So I guess I will order a pair of Dynamixel now, they offer faster shipping and I am really curious now and want to test serial bus servos!! :D
@ed_eilers how is your experience with the LX-16A servos, did you do any stress tests...how are the holding up? I am kind of in the middle of figuring out the servo setup for my robot, and would like to know if its worth using them in my project!! :)