


Ha ha ha. Yes - R2-D2.
I know, it's original.
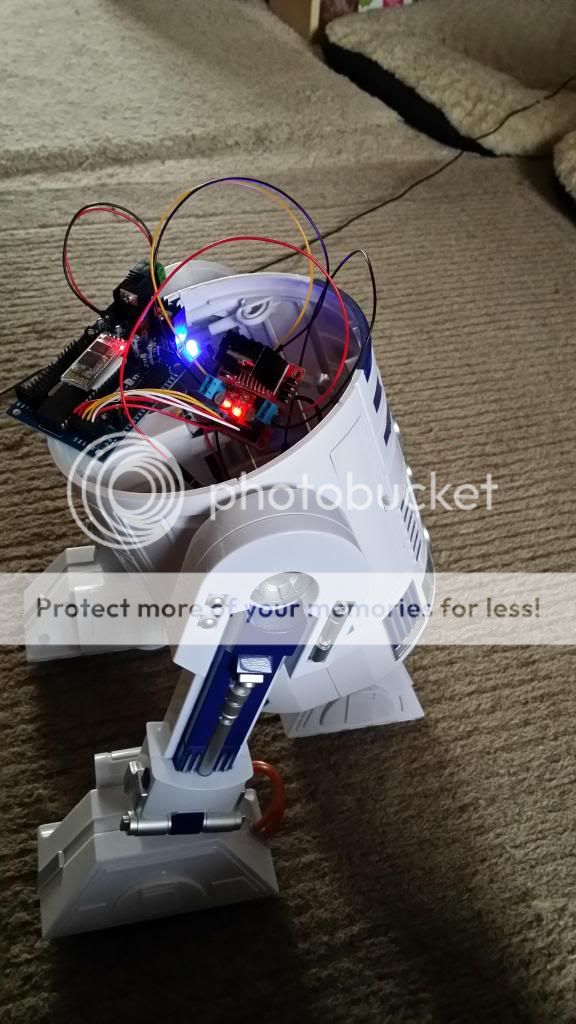
Anyway, finally managed to start on my R2.
This is a small scale prototype - planning on building a full scale version but thought I'd start small.
Not much to report at the moment, but as I progress I'll post more.
I'm using the Hasbro interactive R2 as a base.
And that's it so far.
By robt1275
— Last update
Discover more robots
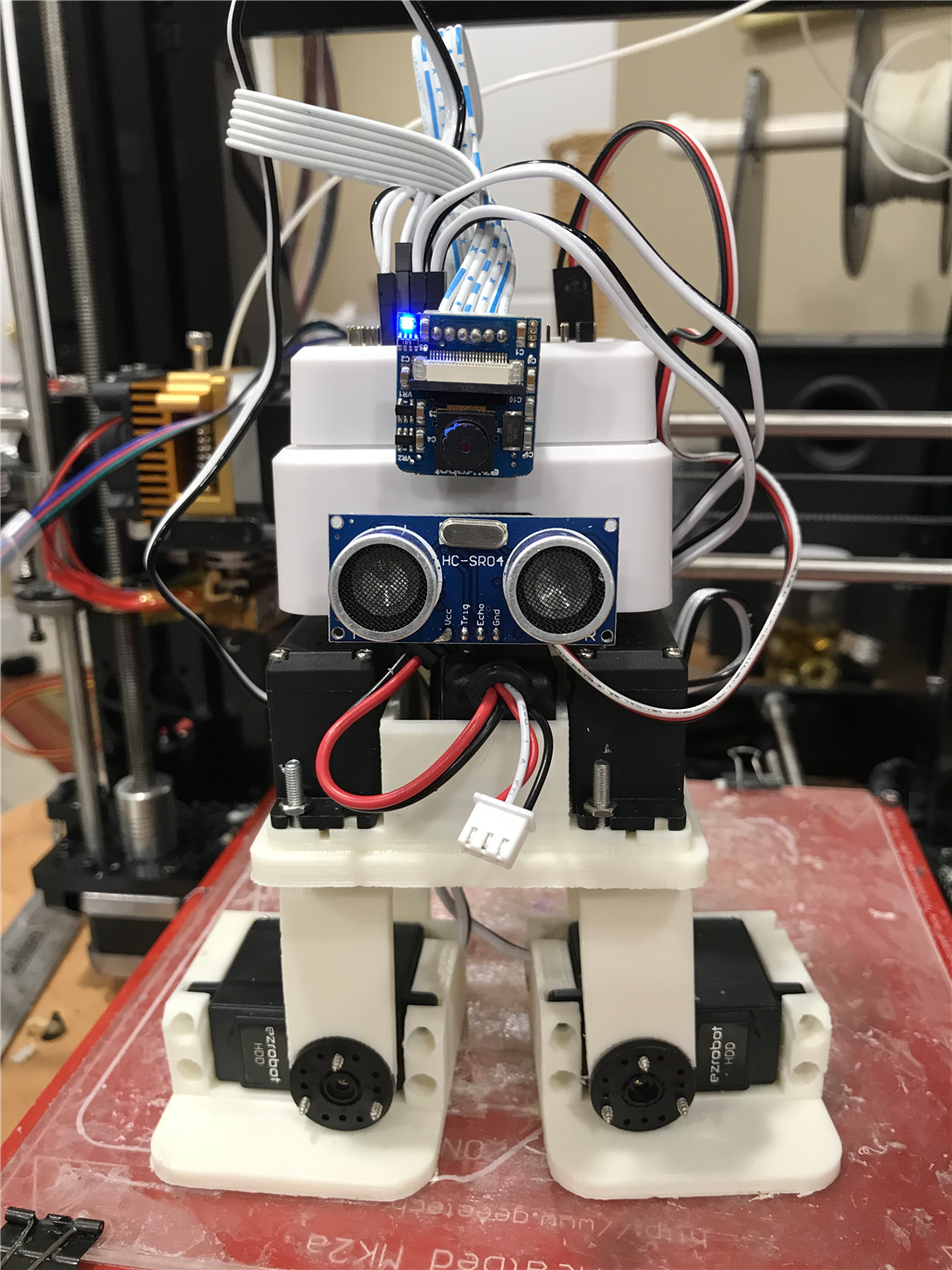
Nink's Development Kit Robot
Upgrade a Zowi/Bob/Otto biped with EZB V4 brain: reuse HDD servos for legs, full-rotation arms, add camera, distance...

Markthebotbldr's Drone Tracking Fun
DJI P4 active tracking follows a hacked Friendly Robotics Lawnbot using Sabertooth motor controller, switchable EZ-BV3...

Ericez's My Real Size Wall.E Have A Job As Sales Promotion...
Life-size WALLE built with Ez-Board, operating outdoors despite minor wheel and leg issues-photos show him working.

Welcome to the Forum...hoping to hear more! ..and see more!
Pics!
R2 never gets old. Welcome aboard.
Progress so far...... Pulled the original circuit boards and sensors. Modified the internals, removing the battery compartment.
I'm planning on using as many of the original sensors as possible.
Next stage is working out the dome rotation.
Here's a couple of pics.

I've got an empty..... ha ha ha.Nice Pics
For the dome, if you want fast, use a dc motor with a smooth wheel attachment(requires bearing for the head to turn on). If you want mid to slow, continuous rotation servo.
I just used the motor that was built in to my R2.... Works perfectly for moving his head. Was your motor not functioning? Not sure why you would/did remove it otherwise
@rryerson - How did you get the rotation sensor working?