



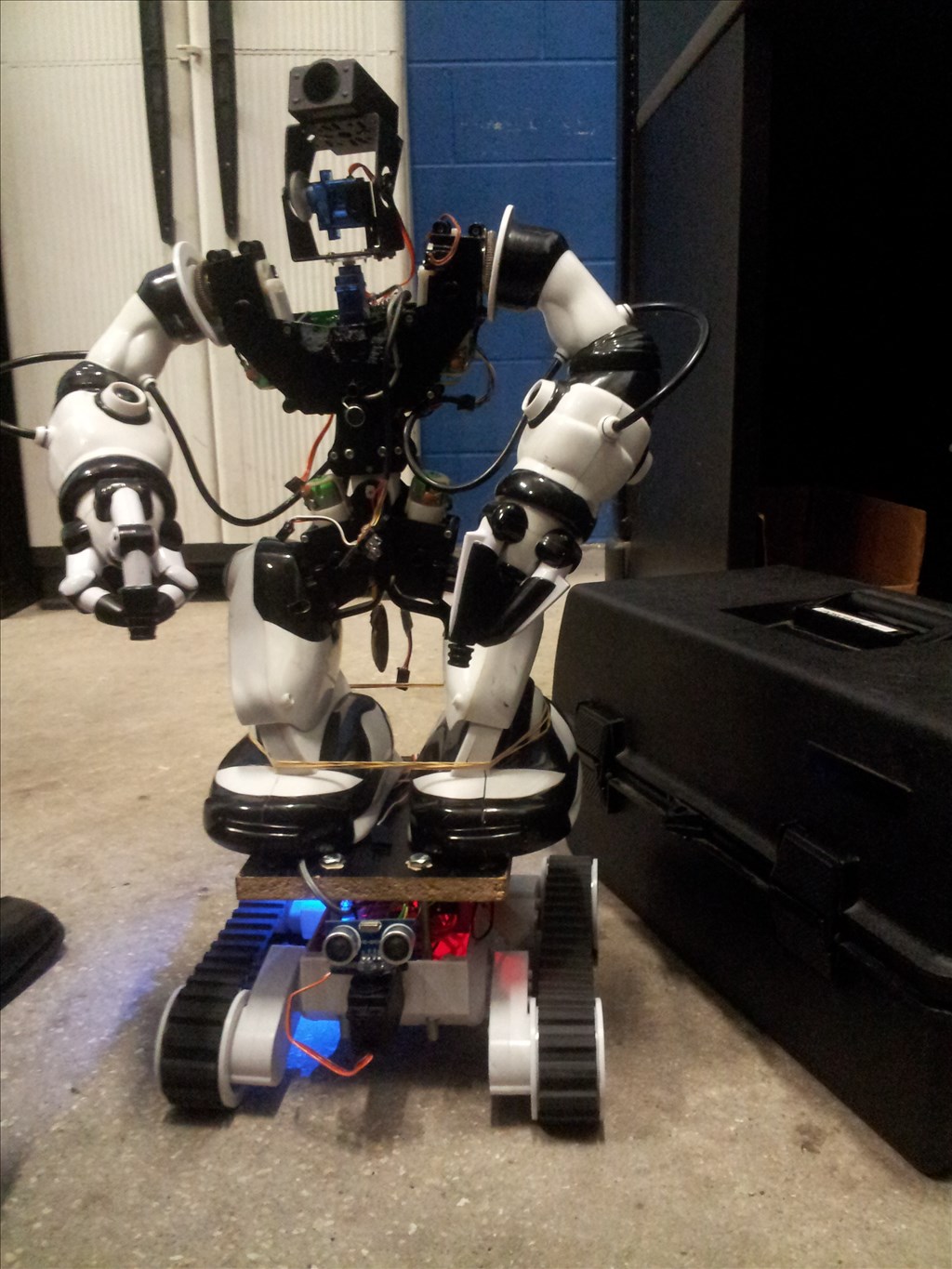
Hello this guys, the above is my testing platform that I have been working on for the past two weeks or so. The only cool nerdy name I was able to come up with is R.A.I.D ( Robotic Artificial intelligence device.)
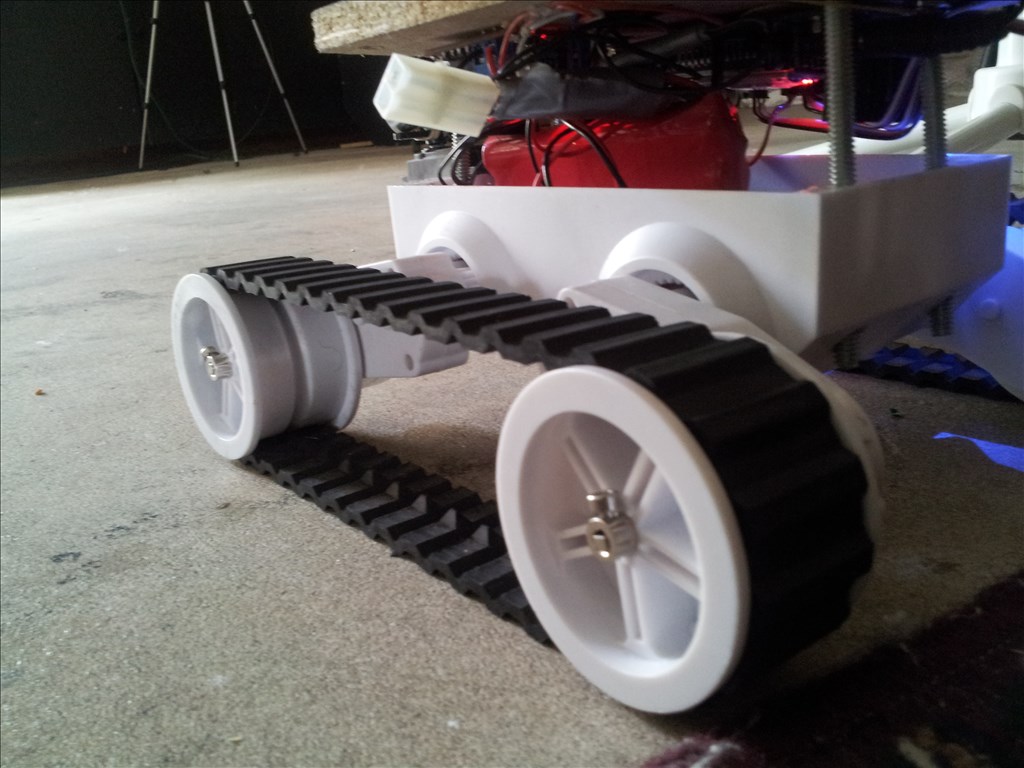
With the 4 D batteries, It is pretty heavy, walk to slow to roam around the house freely as a reasonable speed, So I added track wheels (Dagu Rover 5), awesome grip.
Need you guys opinion, should I take a step further and remove the Robosapien Legs to reduce weight? Also plan on replacing right arm with an actual robot arm.
By PJ_Dtechy
— Last update
Discover more robots

Stevenloffredo90's New To Robotics Looking For Direction
Autonomous box-bot with continuous and HD servos, camera and ultrasonic sensor enabling roaming obstacle avoidance for...

Cliffordkoperski's Cliff Robot
Cliff robot test run showing motion without gyro/accelerometer; future sensor demo planned; affordable Oak Studios servo...

Jeremie's R.O.B. Robotic Operating Buddy
Hack and modernize NES ROB using Synthiam ARC and EZ-B: RGB eyes, servos, IoTiny, LiPo, speakers, motors, scripts, 3D...

The rover 5 can handle some pretty serious weight. I'm running a 6v 7ah sealed lead acid and I've even ran a 12v 8ah. These are both really heavy but the runtimes are awesome and the rover can hang. They are also awesomly cheap.
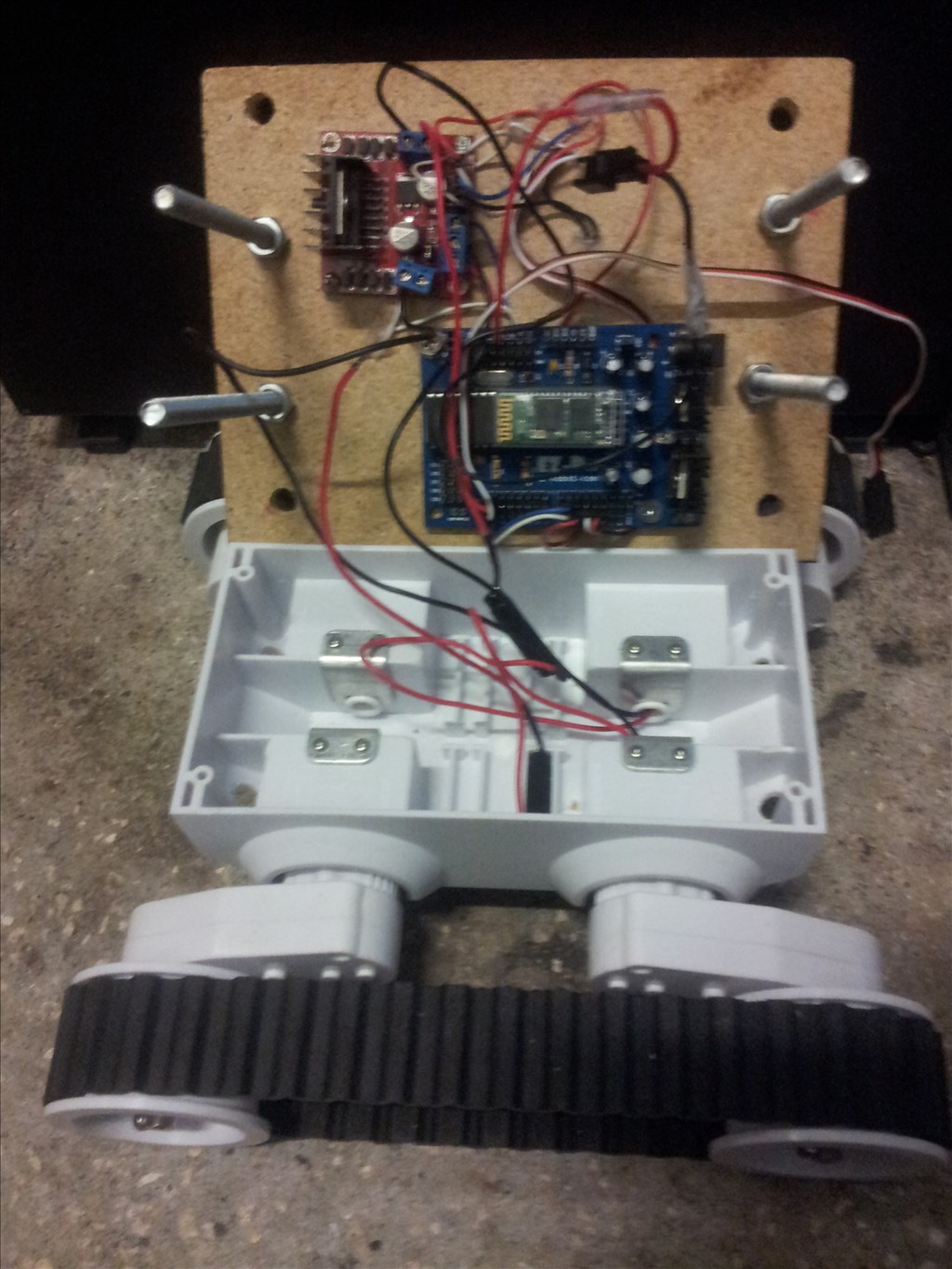
I finally completed my lower half of the project. The Rover 5 is an awesome chassis. I am using the 2wd Dagu Rover 5, bought it of eBay for $50. At first I was skeptical about purchasing, due to the fact I wanted to keep my total project at the low end level. But OMG it is awesome for a house robot. The grip on concrete and carpet is phenomenal, Capable of running over small objects, like cloths, shoes, boxes. I also added a voltage regulator to go along my 2x 9.6v batteries in parallel and my battery run time increase tremendously, haven't fully tested but definitively more than an hour of play. I am pretty complete on the hardware side of the projects.
2x ultrasonic sensor, one in the rear and one in the front mounted to a servo wireless EZ-B camera mounted on 2x servo ( X and Y) Voltage regulator H-bridge Dagu rover 5 2wd model Robosapien skin remove to reduce weight, along with the 4x D batteries( too heavy), 2X 9.6 Volt NiCd Rechargeable Battery Pack 9.6V running in parallel.
The hardest part was waiting for items to arrive from China.
Now the hardware side is completed, it's time to attack scripting.
I will also add an Wifi module, along with an actual robot arm.
completely unrelated to my m main project, but I wanted to torture my gf cat, so I slightly modify it just for giggles.
PJ your robots looks very cool,i have 7 of them and need to find out what to do with the other 5 more. Since i have a roborad project using 2 of them,i mostly know everything about robosapien models. HAVE PCB layouts ,codes and more plus a very good book on hacking robosapien robots.
This is a totally cool project! I can't wait to get back to my RAD now.
@bret.tallent I just saw your RAD projects. OMG it is absolutely amazing, I applaud your hard work and creativity.
@bret.tallent & bret.tallent do you guys mind if I ask for help, I am fairly new to robotics and have some questions
I notice you remove the legs on RAD and use the upper Torso area. I would like to do the same thing, except keep the legs, but simply replace the 4 D cells batteries with a rechargeable battery. Can you please tell me how exactly are you supply power to the Robosapien upper body without the legs?
Cool project PJ...I am inspired to build my own personal house robot too