

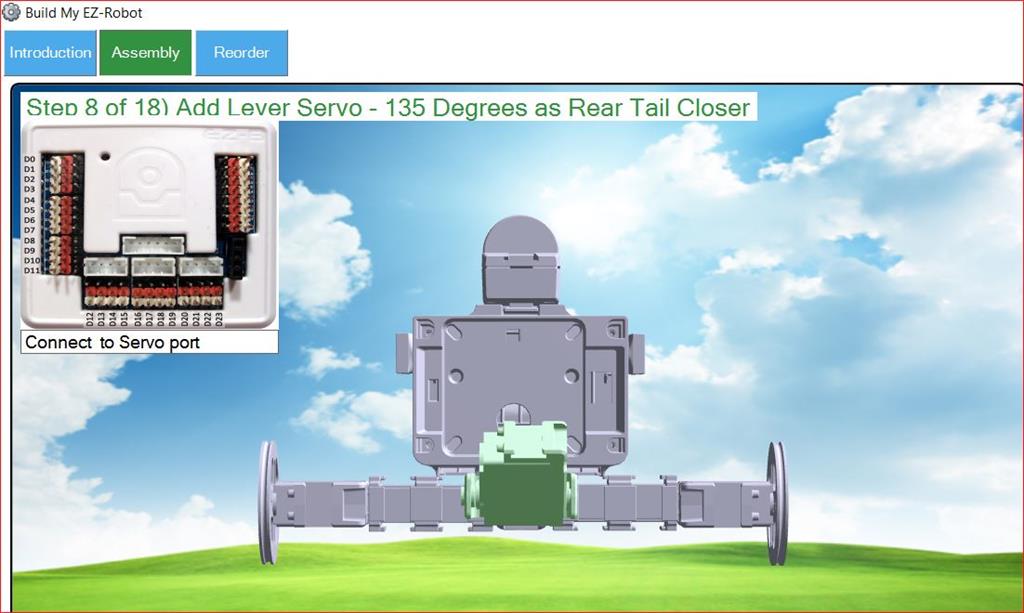
I don't see the actual port numbers defined in the instructions as they are for other projects.
I didn't see the ports listed under Project Details either
I need this info to execute the Auto Position Actions such as Kick
Thanks, Frank
By faengelm
— Last update
Discover more robots

Mastersailor's Noisy Boi (Trademark Pending)
Sub-10 ft remote network robot: 47 mph, plow, flamethrower, remote start, trailer hookup, walks dogs, sentry mode with...
Cardboardhacker's M2d2-The Diy Miniture R2d2 By...
Build an R2-D2 replica from a Lysol wipe container using cardboard, servos and a ping sensor, finished with paper-mâché...

Gabbott's Quadruped Called Thumper
Quadruped robot nearing completion: installing servos for head motion and refining gait to improve walking performance.

If you open the settings on the autoposition, click on the calibrate frame, and click the "live edit" checkbox, it will show you the port numbers except for the wheels. You can get the port numbers for the wheels from the Movement Panel settings.
Alan
@thetechguru
Hi Alan,
Thanks... that answers my question!
BTW, it looks like "live edit" has been renamed to "Port Edit Mode"
regards, Frank