

































































cE9s4PsOgeBQIORwjd5!~~60_1-634818020230156250.jpg)







































































































BO)Lupuc4g~~60_35-634706297915000000.jpg)
LupbT6!~~60_35-634706298769375000.jpg)





C5j!~~60_35-634655044863125000.jpg)
















C5j!~~60_35-634659603510781250.jpg)


































C5j!~~60_35-634651704046230469.jpg)






















































































































































































































































































































































































































































































































































This project has evolved some , the basic rundown is I'm modding two Omnibots , one a regular the other a larger 2000 model. I will have two ezb kits , rad base idea was thrown out because of so much noise but could go back on the table if the omnibot drivetrain is too weak to pull it.





By jstarne1
— Last update
Discover more robots

Gabbott's Quadruped Called Thumper
Quadruped robot nearing completion: installing servos for head motion and refining gait to improve walking performance.

Doombot's Archetype Finally Complete
Archetype droid using EZbits and an EZ-B: expandable design, currently on a 2A regulator with supercap fix; battery...
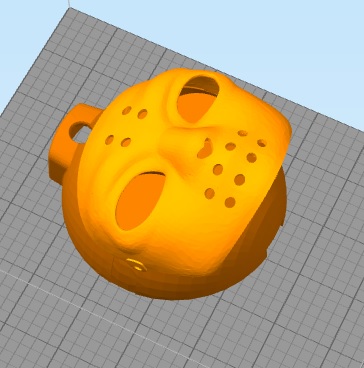
Justinratliff's Justin's Custom .Stl
Custom 3D JD hockey mask STL for JD robot face, printable and paintable for personalization in Blackhawks colors.

Yes i know its a data switch , But you didnot say that in the post , As i said just clarifying here .
As for programing i find it as hard as you do , but im learning too . May be we can comeup with somthing cool with multi banks of sesors and nav + security mode code.
Steve_C.
mostly working on building my omnibot project first,then work on the code ,and working on testing sensors ,like the compass in another post,and the dirt sensor for JOSH ,mostly know about every sensor made and how to use them,and how to mostly set them up for very good navigation sensors need to be placed on the robot correctly and horiz and vertical makes a big difference in good navigation
data switches are mostly digital,not really analog analog switches are what they are called ,mostly spst or spdt like cd4016 when more then 2 analog its called multiplexer chips
@Steve thanks man , I think 1200 max oz and 800 working ounces should be good. Basically the goal is 2.7 pounds lifting/ working weight @ the claw. Somehow doing that data switcher would be cool . IM not to that point yet but sounds useful.
hi josh
dont block the holes for the sensors just cover them ,then you could put them back in at a later date.
whats the weight of a beer ? i think thats the most important thing .
Steve_C.
i think he said before a wine bottle too,plus need to add the weight of both arm pieces with servo's ,plus hand
@Josh, will you have the upper shoulder hollow? Nevermind. It wouldnt help much at all.
@Steve yes a claborative effort to work on the programming end would be great!
I have several wine bottle a at home I could test with. IM super excited this is all coming together so well!
To do list
Sand Jarvis like a madman lol
Lots to do still but great progress
Iv been away for a month and in that time Jarvis has grown about 2 foot and got more sensors than cape canaveral.
Now summers over must work on Aegis.
I used to paint cars for a living . dont make your fingers bleed with the sanding