



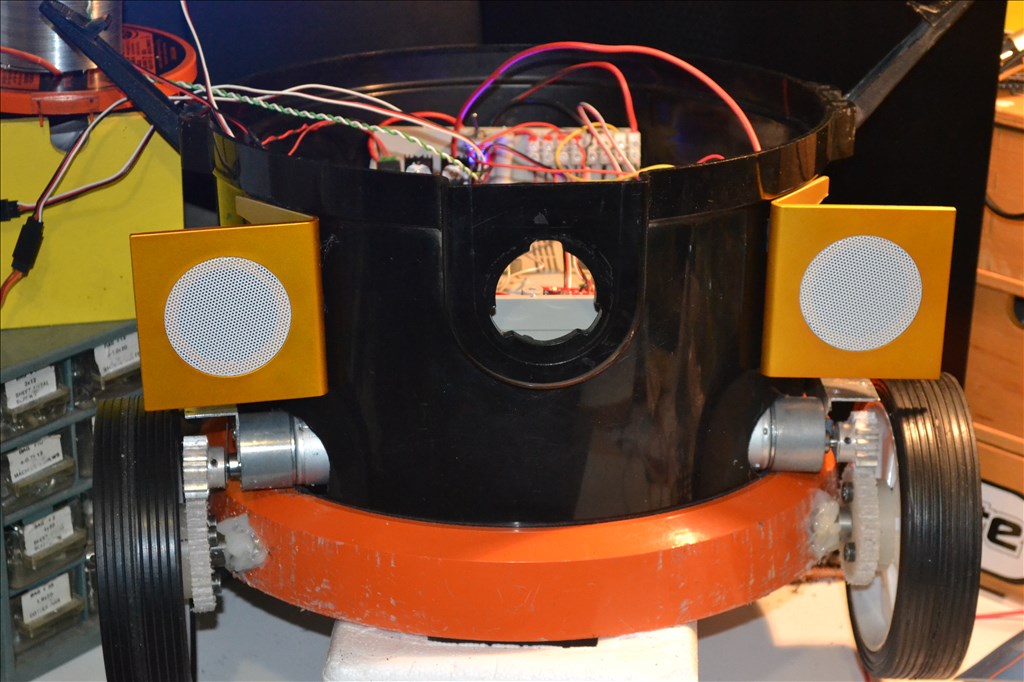
I am in the process of converting an old VAX vacuum cleaner into a robot. His name is PI-ro
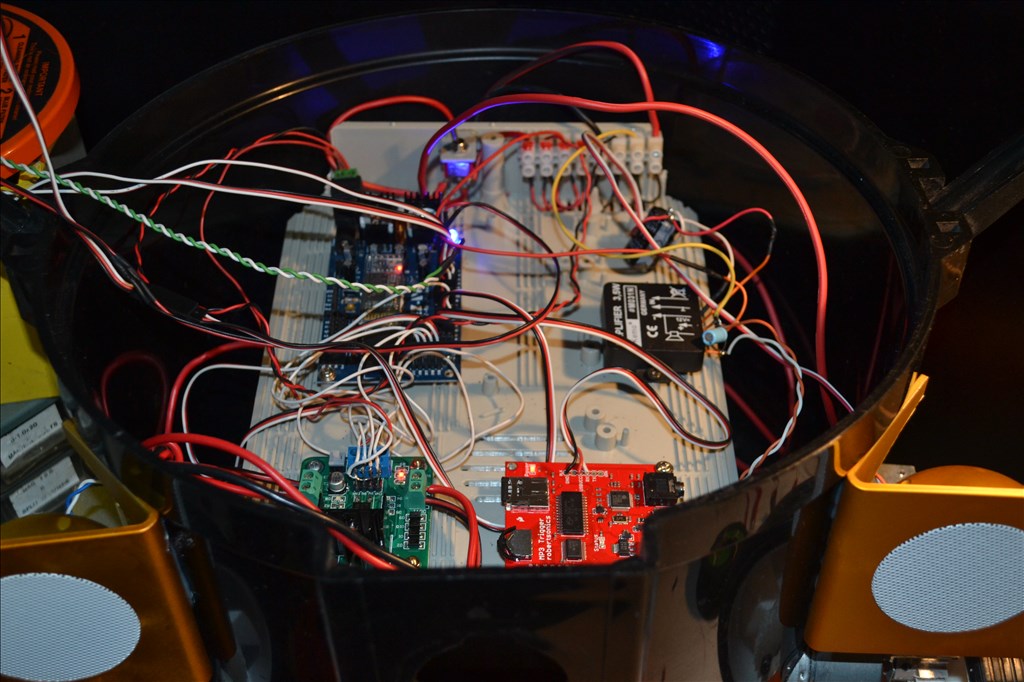
I have inserted a Pentium 4 motherboard into the robot and run remote desktop to it by wifi from my laptop. The idea is to make PI-ro self contained. I am currently adding to its voice response vocabulary and have just finished cutting the spur tooth gears for the main wheel motors. I am waiting on my EZ Robot order to arrive which will let PI-ro do more than run around in circles.
The name PI-ro originated from my early plans to develop a robot using the Raspberry PI until I discovered the EZ Robot system, however the name stuck.
The following video shows PI-ro's first test drive with computer and associated components removed.
Have a look at the following Youtube video:
Will keep progress updated on this website.
Regards Martin Western Australia
Discover more robots

Ericez's My Real Size Wall.E Have A Job As Sales Promotion...

Tmesserschmidt's Meet Robot Betty9


Cool! Can't wait to see your progress on this bot.
Very cool for your first robot. Thanks for sharing the video.
I am using a DC to DC atx power supply for the Pentium 4. Motherboard, psu, hdd are all on board. The motors are powered from a 12 volt, 12 amp/hour sealed lead acid battery and the computer from two 12 volt 9 amp/hour batteries in parallel. PI-ro's total weight is around 15 kg.
PI-ro is running Windows XP and service pack 3. The computer is configured to boot without keyboard, mouse and monitor. The remote desktop software is loaded as one of the startup programs along with the EZ-B software.
Hi Vk6mj,
A warm welcome and congratz with this impressive project. Very nice work indeed. I'm hoping to see more of your work soon !
Greetz,
PhG
Thankyou to
bret.tallent, EEGbiofeedback and PhG for the great comments.
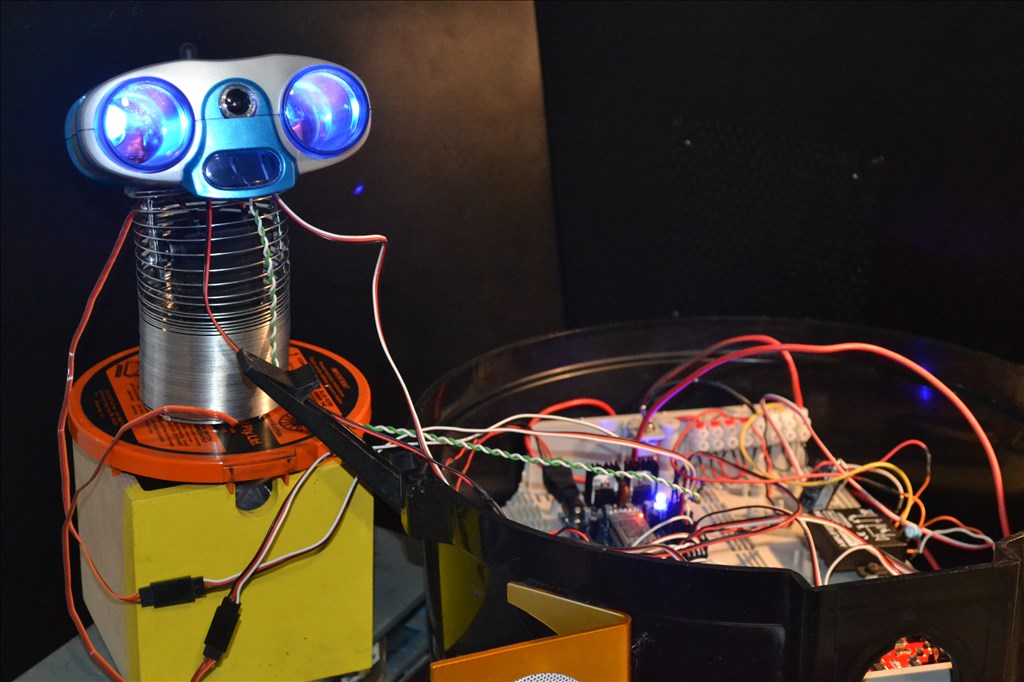
I am now in the process of building the computer and other components into their permanent places inside the robot body and will do some more load testing of the motors and gears with a funtioning onboard computer system. I am still thinking about what to use for PI-ro's head in which I plan to mount the video camera and distance sensors. As a final addition I will give PI-ro some arms and a docking port to which he will connect when internal battery volts get low.
Thanks for your interest. Will keep you posted as things develop.
Martin
@vk6mj thats awesome may I ask you how you configured boot without monitor mouse or keyboard. Im all about the autonomous robot! Just a suggestion, you may want 2 or 3 60mm or even better 80mm fans to keep your pc and hard drive cool because your airspace is very small..
Hi jstarne1
Thanks for your comments. I simply changed the bios config on the pc board to ignore all errors on boot up. I use TeamViewer7 as my remote desktop when I need to access the bot. I have a usb wifi dongle in place and I will connect to the ez-b as usual by bluetooth from the pc motherboard. Yes there isn't much air space and once the top is on then I will need extra air flow. There is a front hose hole which could be used as an air intake. Though I think I may make a larger hole underneath with a fan and grill to pull air in and push it out of the original air vent at the top.
Martin