










I am really excited about the new Synthiam mapping/nav functions as well as the additions to the Roomba movement panels. I needed a new bot to play with so I am making............"something."
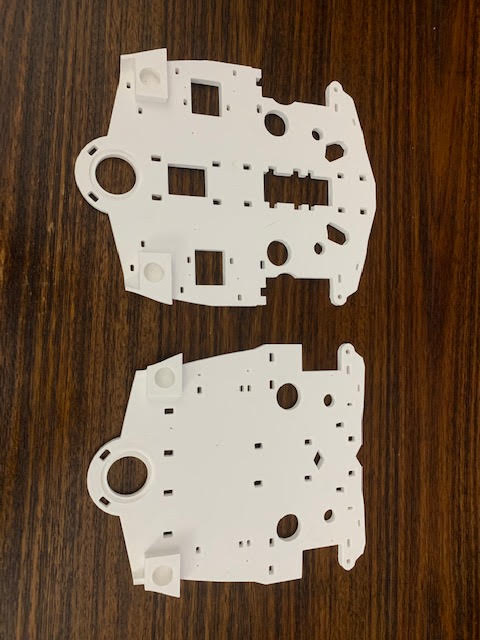
Not quite sure what this will be but I am using an inmoov body printed at .64 scale along with my eyepod design for a head. This is on a new Create 2. I spent a lot of CAD time scaling the inmoov and making sure servos fit and all the functions were preserved. If you scale the inmoov down .64 then the large servos it uses become roughly the size of standard servos, that is why this size was chosen.
Since he is a small inmoov that moves I have named him Mini-Move

By Perry_S
— Last update
Discover more robots

Robmcc's Brewster The Beer Buddy
Beer Buddy robot prototype opens fridge with updated code and LED light strips; demo video coming.

Leversofpower's Roboquad Redux
Hack Wowee Roboquad for custom control, no remotes, IR codes, waiting, version issues or millisecond delays

Derrick's First Bot
Build an autonomous vacuum with EZ-B: control DC motors, H-bridge, servos and sensors; camera tested with Synthiam ARC...

perry S
these pictures are fantastic .
thanks
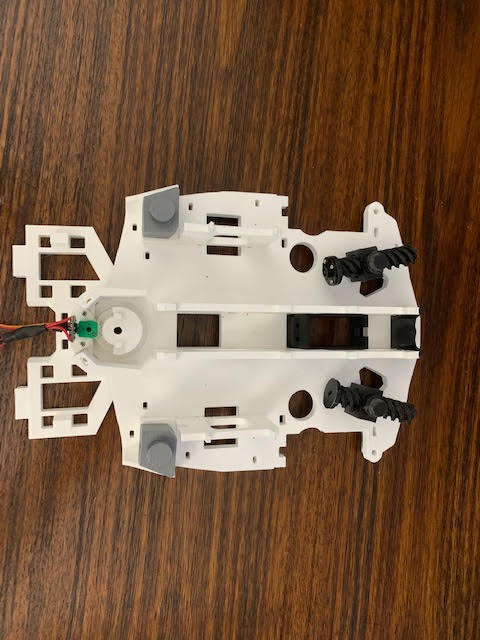
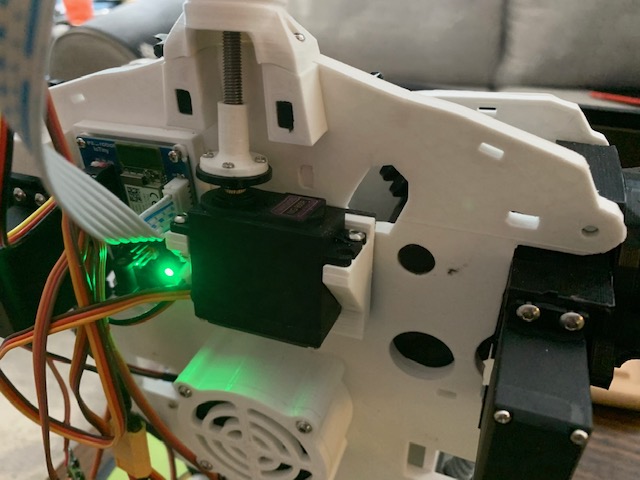
I am hoping you see something that will help you with your build. Mine may be smaller but all the concepts are the same. Hopefully you see what I had to do with the waist servos. I think you will have to do the same in the future. Keep it up brother!
hi perry s
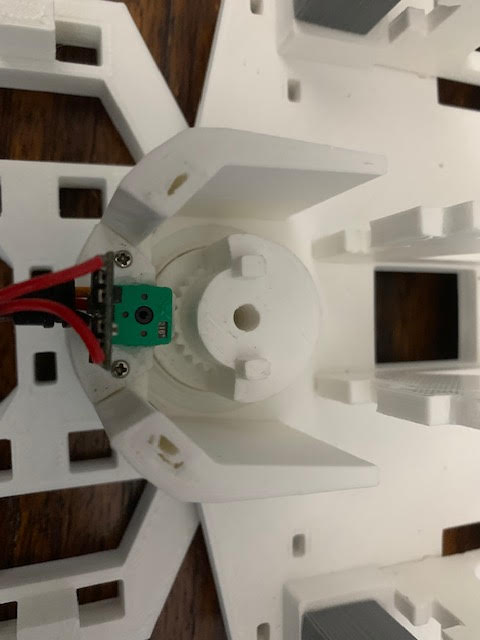
i am a little confused about this picture . it seems the middle lower part is backwarts consider the grove for the bearings .
eather the the middle part is backwarts or the wormgear nut .
Wow, you have a very sharp eye Nomad. You are correct, the center piece is backward. With this little bot there is no need for the ball bearings at this joint so I just went ahead and used the pieces since they took so long to print. I have since fixed the CAD file but as I said, the parts were still usable. I think the bearing design is wrong anyway as the weight of the robot is always pointing down. It needed a roller style bearing here if anything.
nomad, how are you? and how is your InMoov coming
hi ezang
just paint
hi perry S
i learn from a pro YOU haha
YOU haha
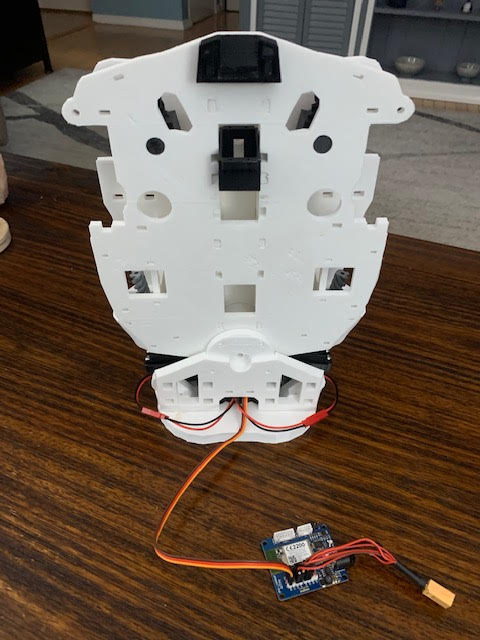
So, I have had some time to make adjustments and place the next X-asis servo i the correct position. You can see it below.
You can see here the fluid movements provides by the touchpad control
Loving this. Nice progress!