






















































Hello EZ Robot! Meet Dusty, he is a omnibot torso and I currently have the choice of robbie at head or a omnibot done where you can see inside. He will handle a few basic functions and us made more simple than his big brother Jarvis.
- He can vacuum (which is loud) with power brush and impeller
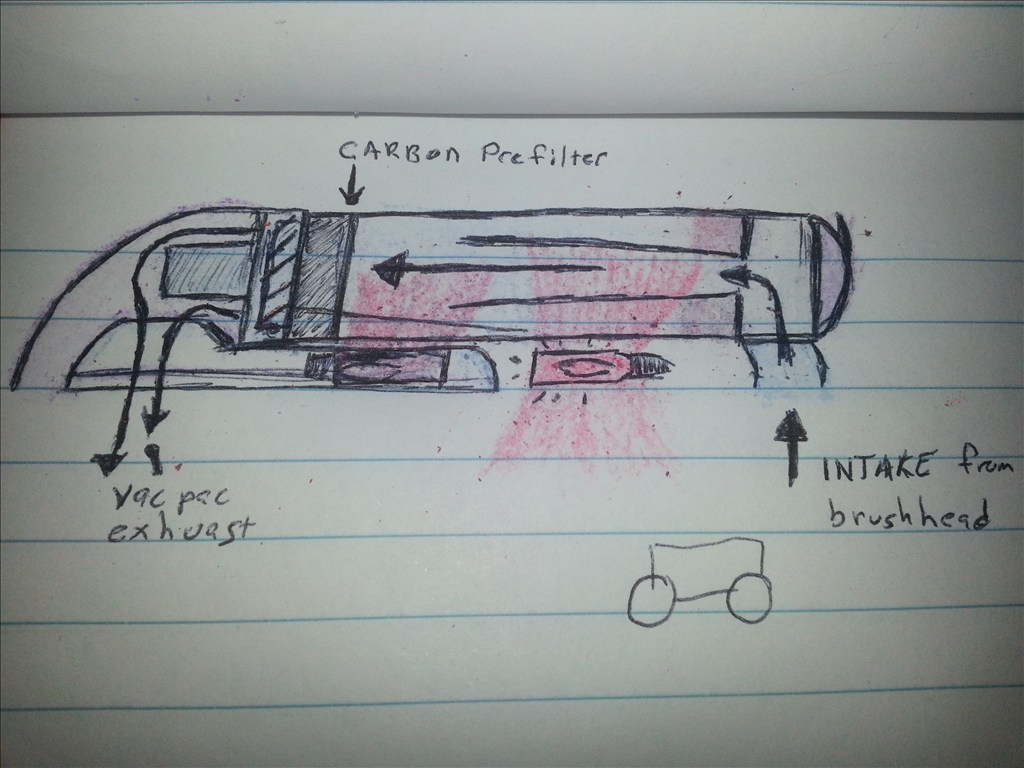
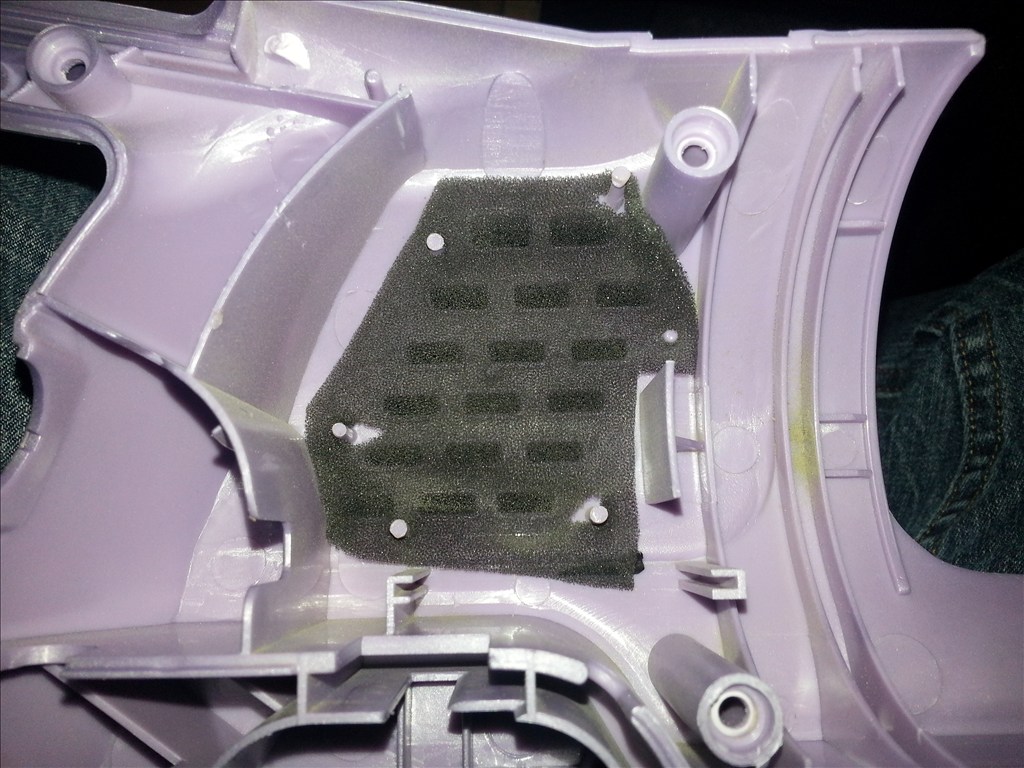
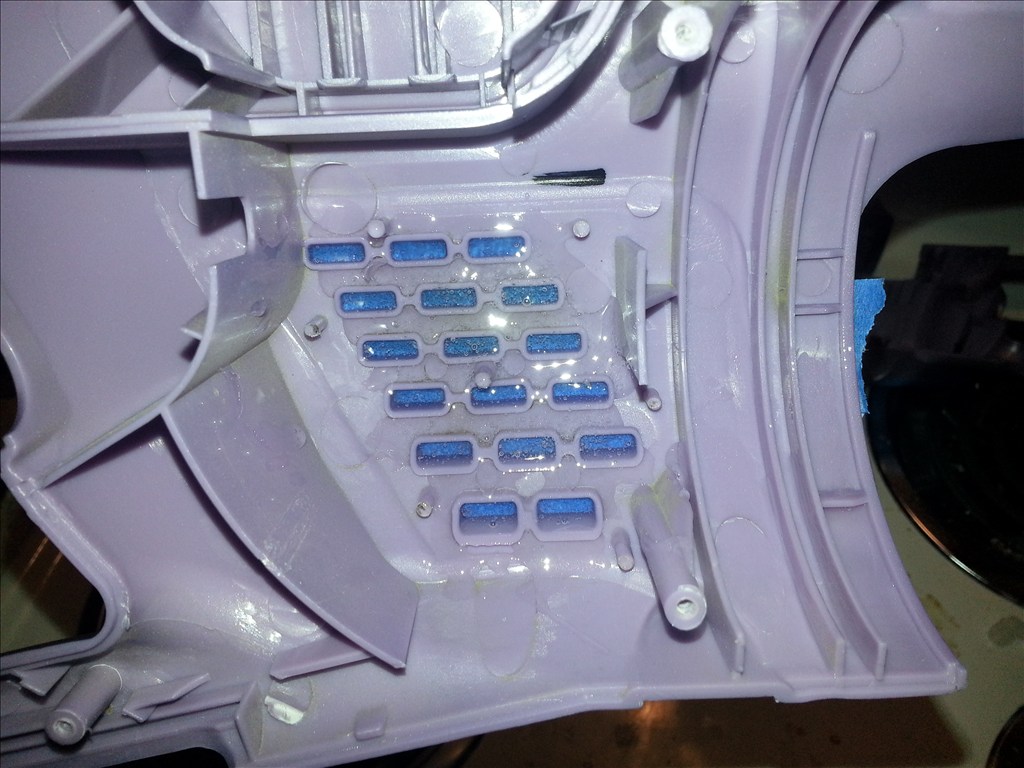
- He can "sweep" nearly silent by running the power brush at a reduced voltage and a small DC blower providing low level auction. 3.dusty will have two germicidal bulbs ,.one facing downward to the floor and another behind intake fans that not only cool electronics but it pulls air through a Honeywell two stage carbon filter. 4.dusty has 4 build in filters foam pre filter , and 3 carbon filters.
- He will have a camera on pan tilt bracket. He will be controlled by Bluetooth or wifi.
- Long runtime , 2 x 12v 7ah batteries.
Any other suggestions guys?
]

By jstarne1
— Last update
Discover more robots

PEEK's SAM Inmoov Robot
Building a complete InMoov robot as a newbie learning assembly and programming while seeking mentorship.

Toymaker's Dewey (Drone:1)
Iconic 1972 Silent Running drones on display: three scale models of Dewey showcased in my studio.

David's Ai Dino Robot
Upgrade a toy walking dinosaur with an EZ-B brain to create a smart robotic pet, unlocking expanded behaviors and...

Very nice. Is there going to be enough room in that guy?
@jstarne1 Man, I am still working through your Jarvis build... now I will never get anything done
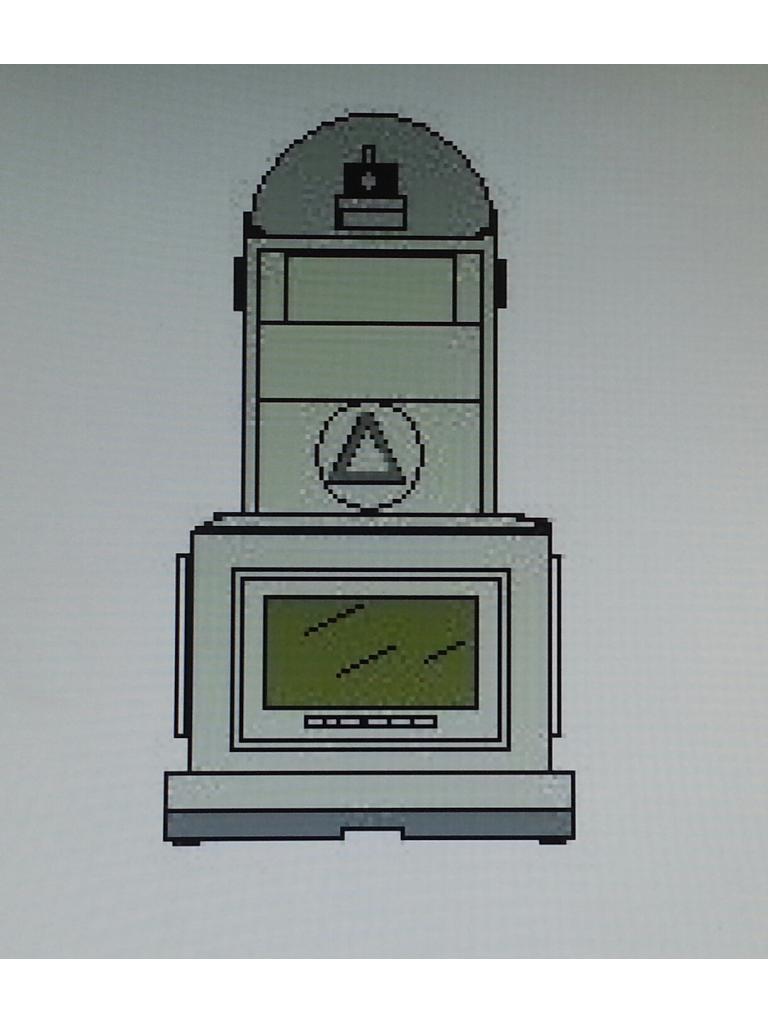
Go with the clear dome and interior lighting. Mount the camera on scaffolding like arrangement to allow view past and into the body.
Lol thanks gunner , makes me feel like a million bucks!
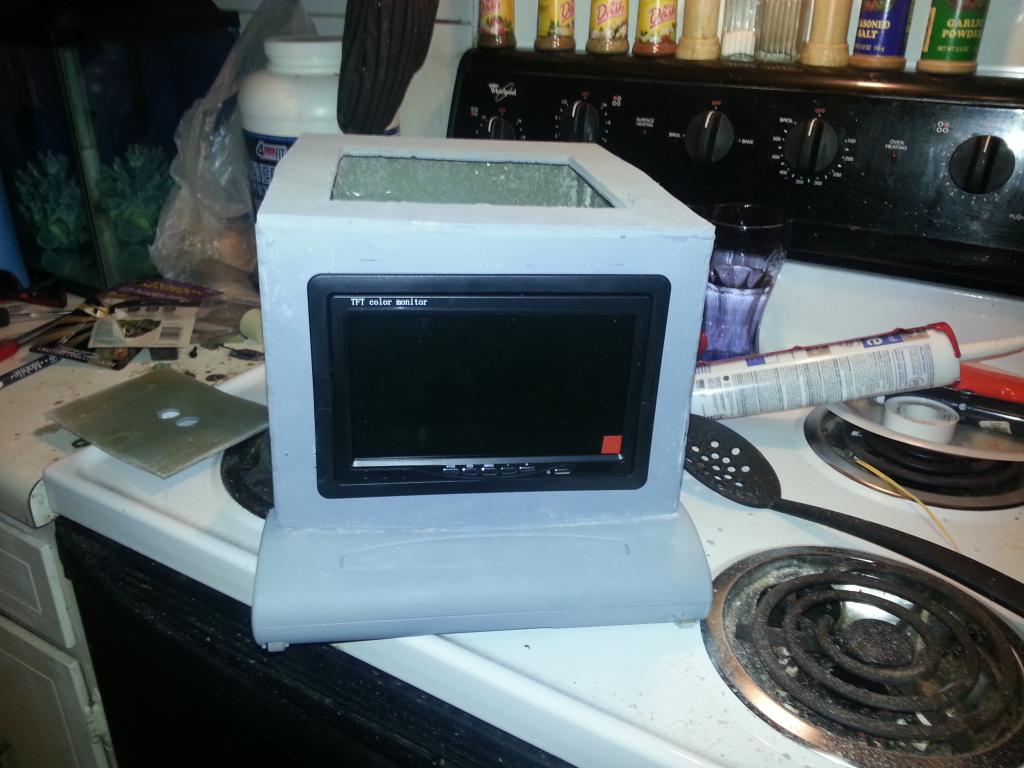
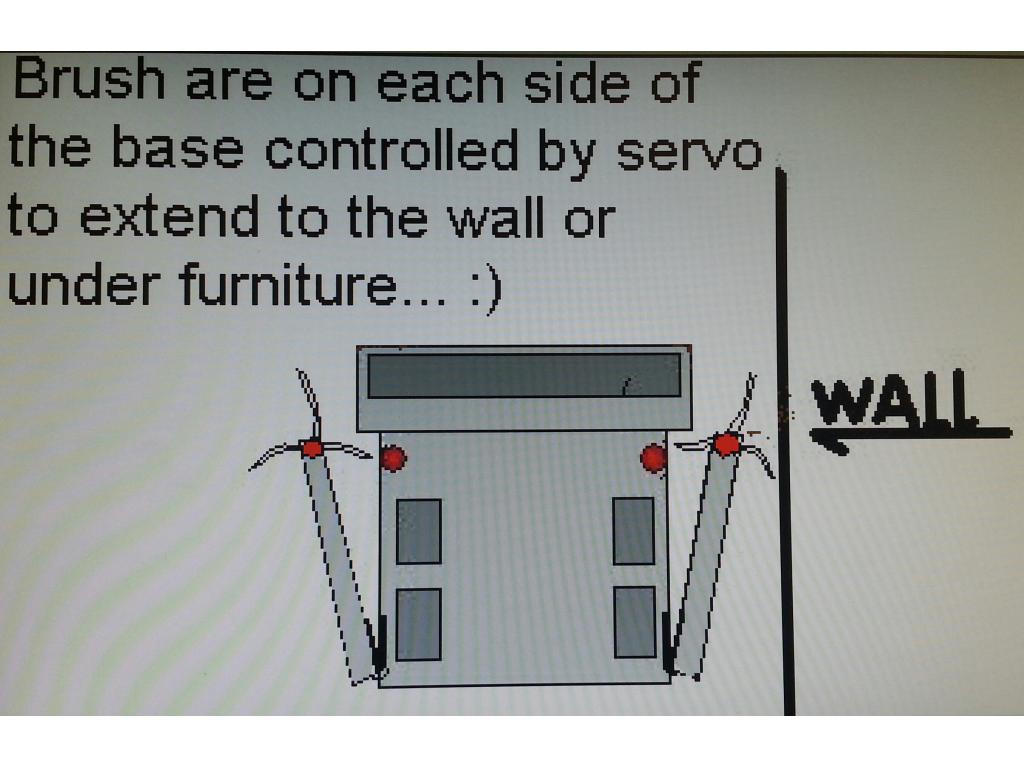
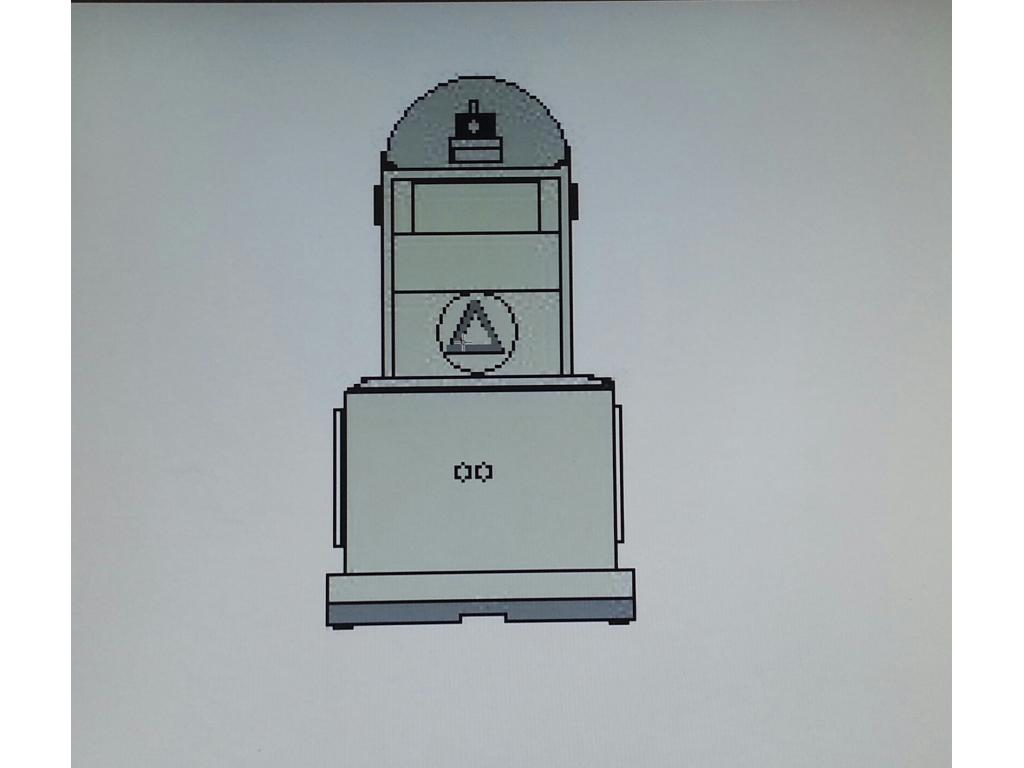
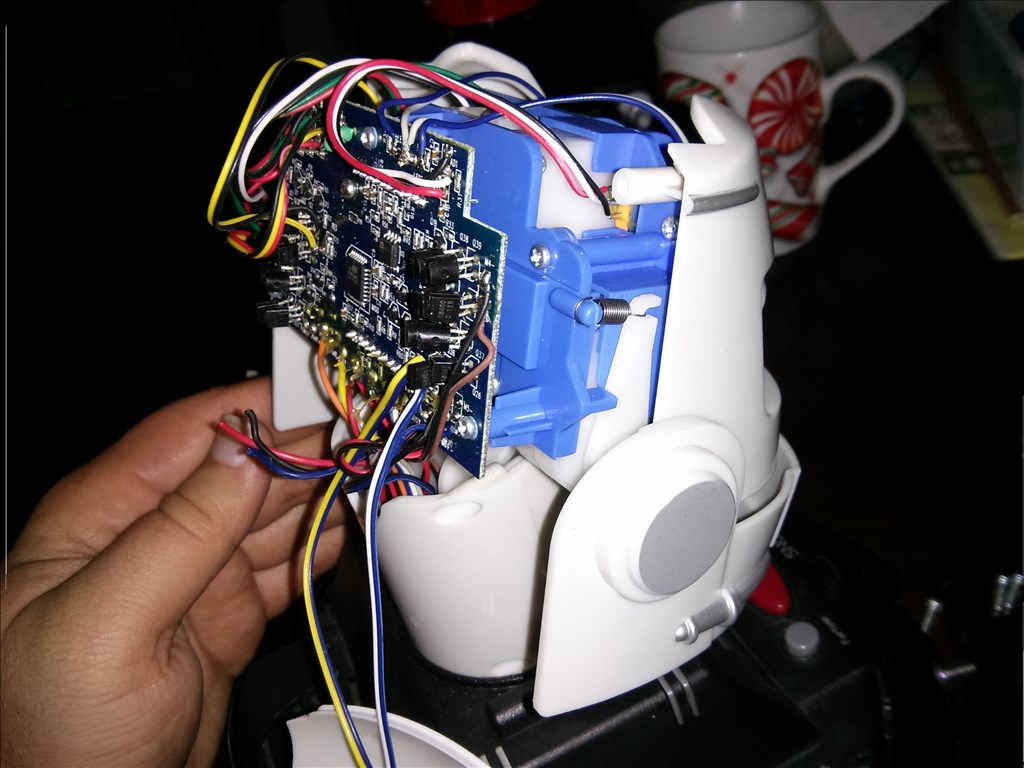
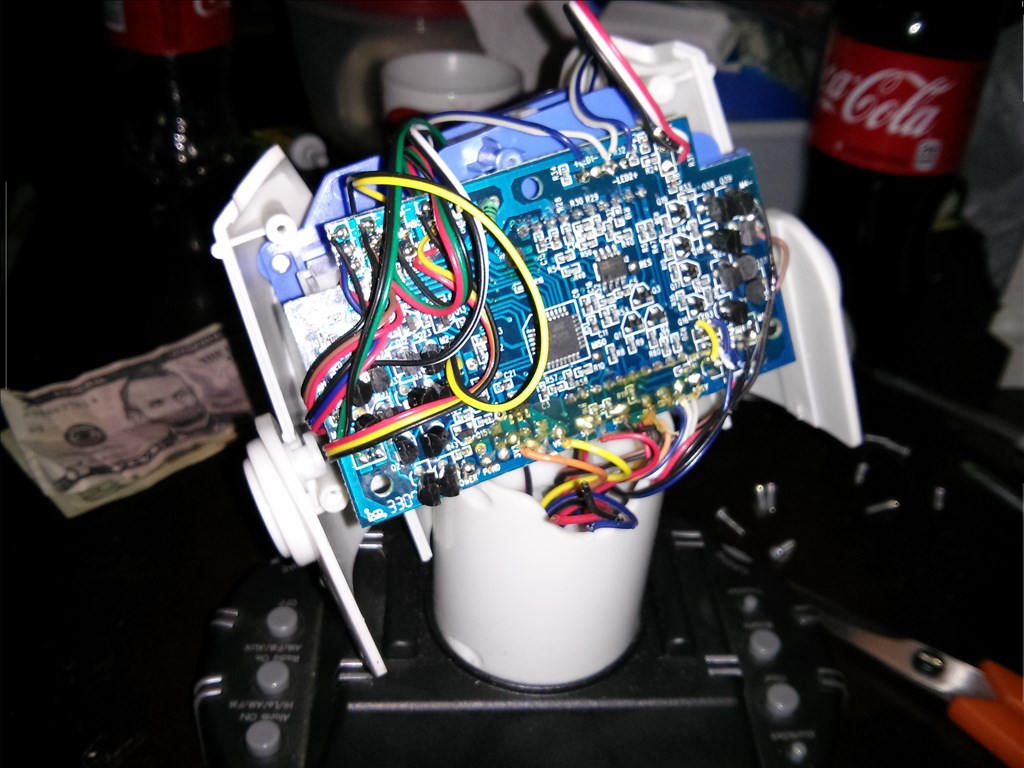
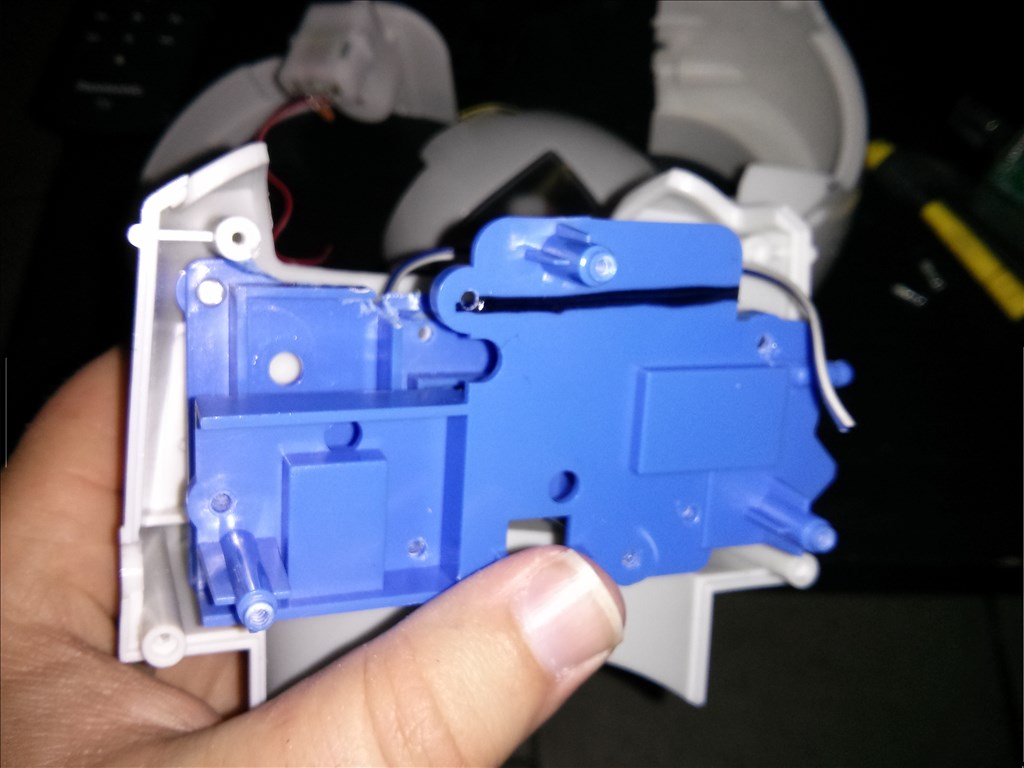
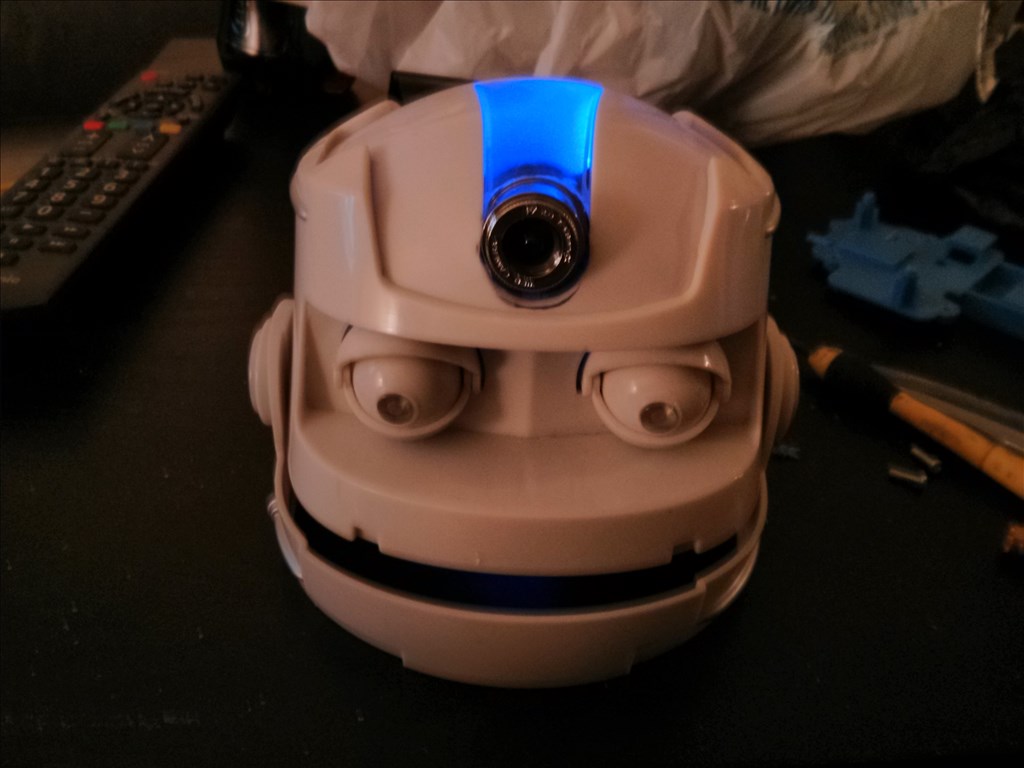
Here are some pics of the robot so far. The dome is in the mail and i already made the pan tilt bracket for the ezrobot.camera. I must install the vacuum on dusty's back and find ways to mount the roomba side brushes i bought to get closer to furniture and corners. I already made new black rubber tires.

Hard rubber tires replaced the old cracking and flat tires.@gunner , so you think i should do accent lighting inside the dome somehow?