















-635425708661417124.jpg)

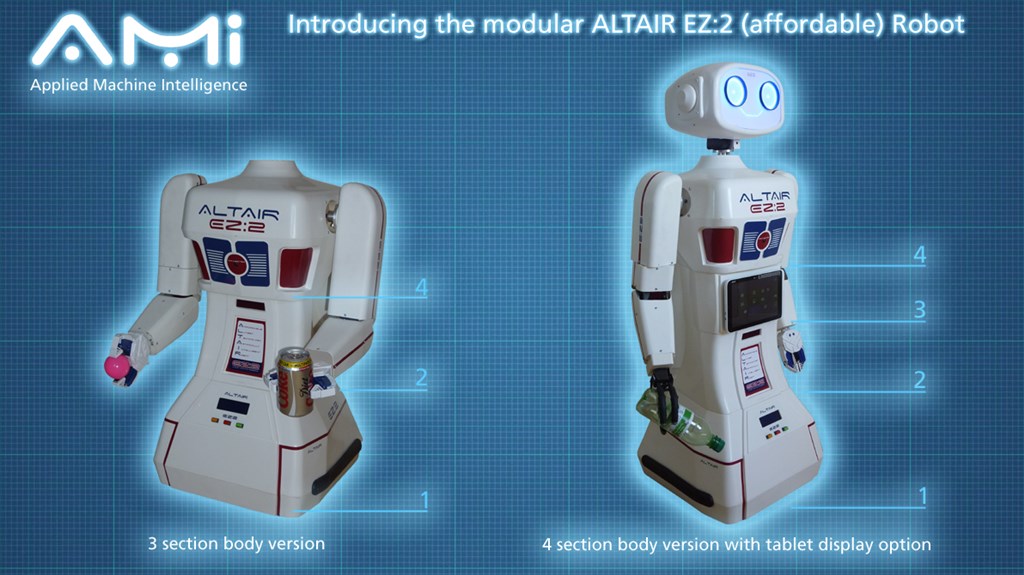
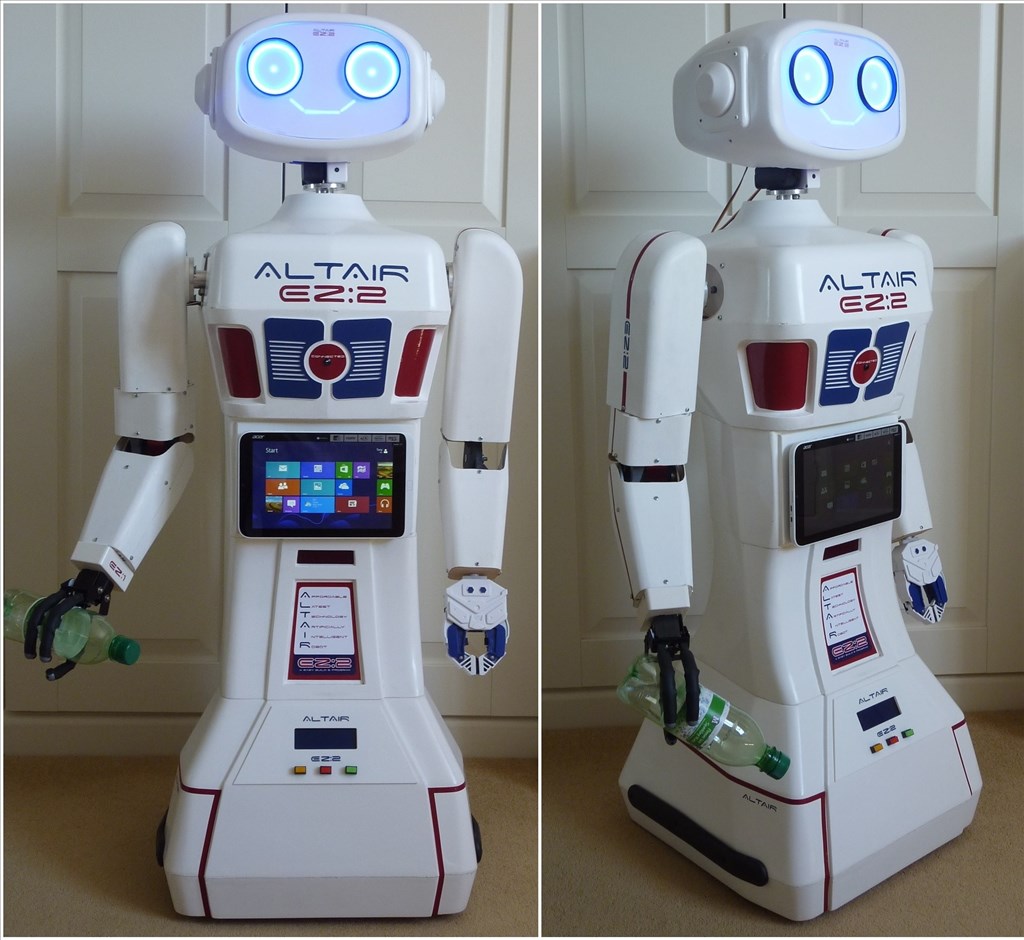
Introducing the ALTAIR (Affordable Latest Technology Artificially Intelligent Robot) EZ:2 Robot
The first unveiling of the EZ;2 Robot (the commercial version of the EZ:1 Robot that has been seen on this forum) - you guys are seeing the EZ:2 first!
I am proud to confirm that it will have "EZ-Robot inside" and powered by the awesome V4 - well done DJ and the EZ-Robot team for making such a great product that allows robots like the EZ:2 to be light years ahead of the competition!
The EZ:2 will also have face and object recognition capabilities and our advanced Ai engine and will work together with the ARC software.
Because we have been waiting to design in the incredible EZ-Robot V4, we are behind on our development schedule (but it is worth waiting for) and we will now start beta testing in 2015.
I wanted the EZ:2 to look like a robot and not a humanoid and you will see this reflected in the design. I guess not everyone will like the design, but it is practical for (low cost) mass production and because of its modular build transportation costs are reduced.
Hope you all like the EZ:2.
Tony
Discover more robots

Mcjeff0125's Robie Sr, Dr. Theopolis Hybrid
Kleinjd's 17 Servo Biped (Formerly Robonova)


Hi @RichardR, Looks like Firgelli has two styles of actuator that may work for small to medium load. Their L12 and L16 series. Sounds like the L16 moves pretty quickly and id the strongest. If you want larger Firgelli actuator's they have a sister company that will provide them. They have one for the Lego Mindstorm and other types of motor.
www.firgelli.com/products.php
Here's the specs:
www.firgelli.com/products.php
@Dave... thanks ....
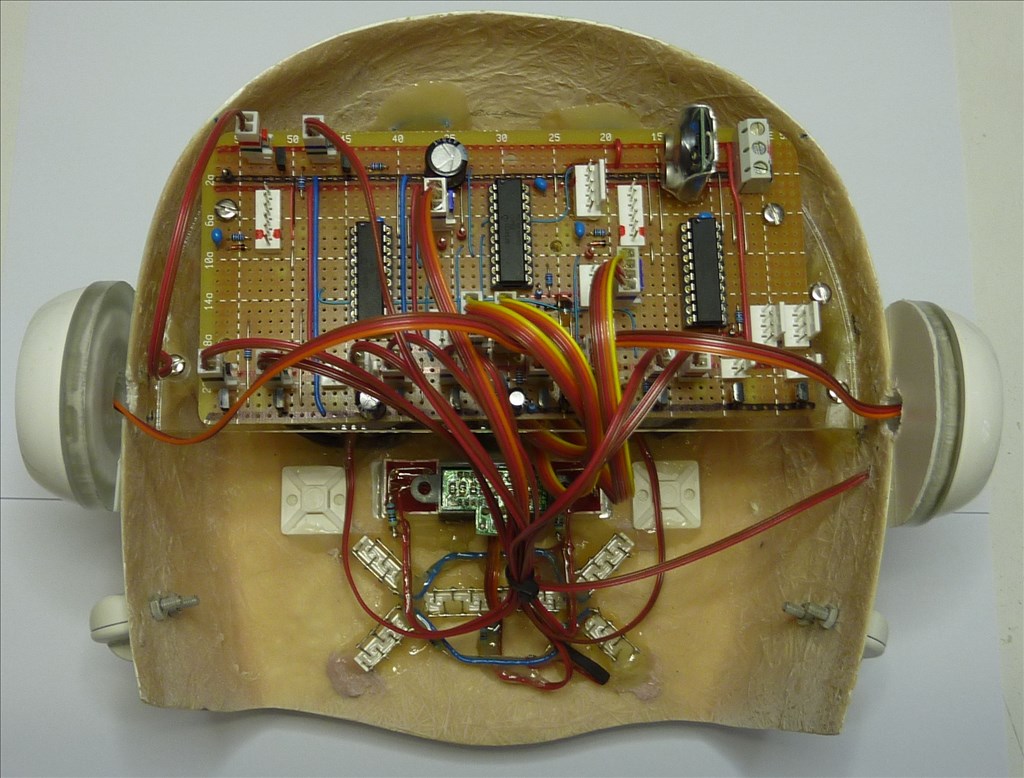
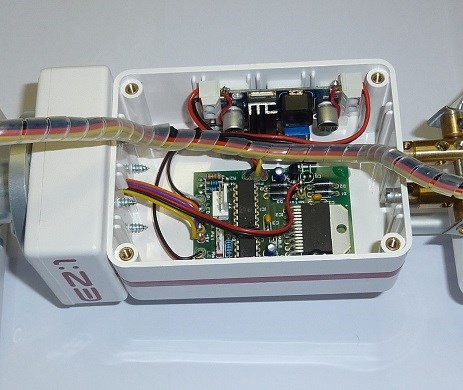
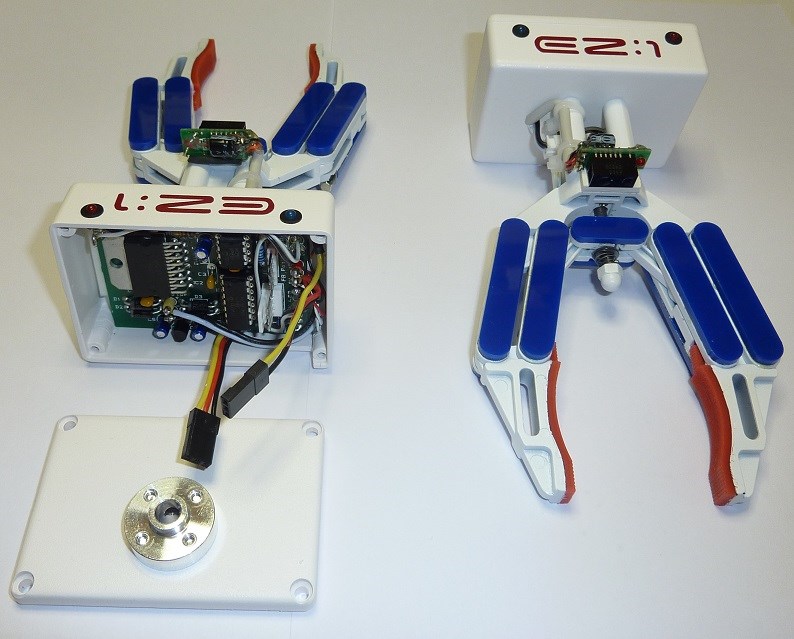
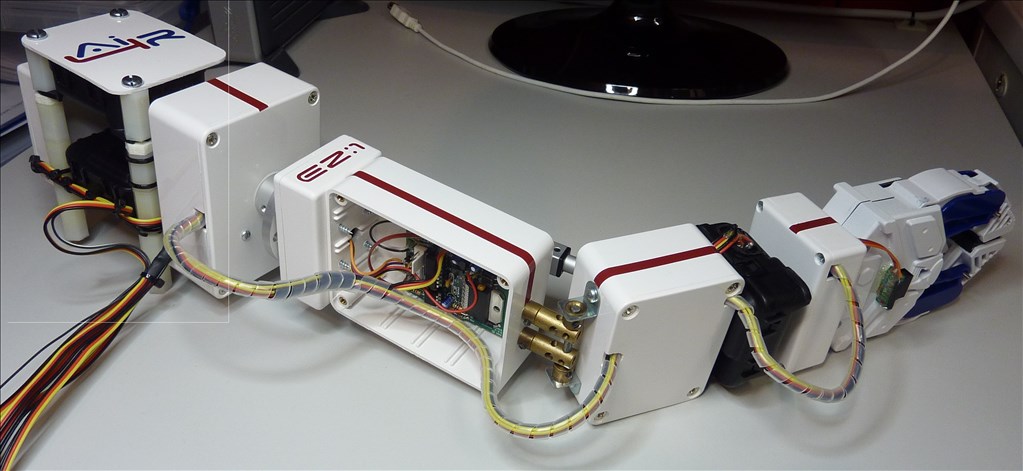
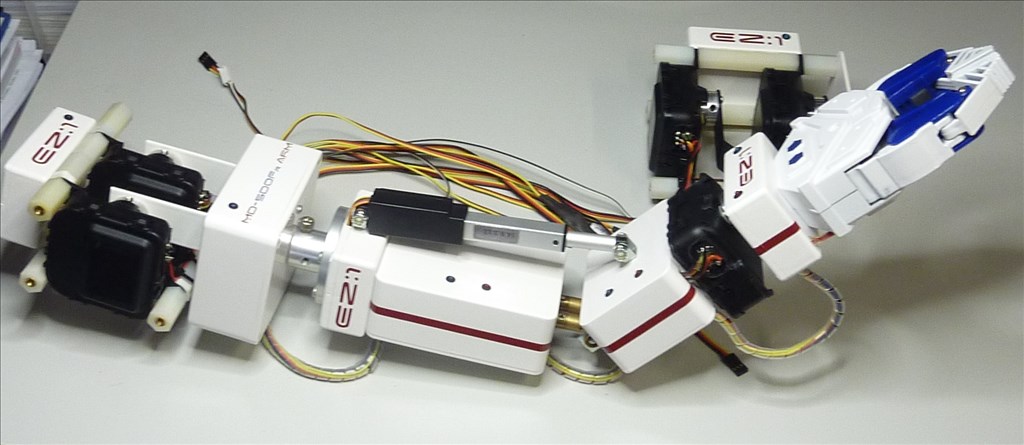
Richard R, the linear actuator I am using is the Firgelli L16-150-12-P which is surprisingly powerful. I need the P (linear feedback) version as I want max torque so 12V is important also I want to use my own Smart servo PIC and board (which has current sensing which is important with any worm gearing drives like these).
Here is a jpeg showing the Smart servo board controlling the linear actuator on the elbow. You can also see the miniature Sharp IR ranger on the claw which detects any object close to the claw tips.
Great to see you back Tony and sharing your robot building experience with all on the forum again ,missed your contributions in the recent past ,very detailed as always. Pat
Sweet Tony. I'm so jealous. That's a Sweet arm! I wish I had your skills.
I spent the day today going through the Kangaroo x2 ramping script you wrote and just couldn't wrap my head around most of it. I did get the motor to move at different speeds and stop at certain positions but couldn't figure out how to get the control and ramping effect I'm needing.
The guys over at DE sent me a copy of a Bata version for both their new hard code for the Kangaroo and the DeScribe software that gives the Kangaroo Accerallition control in position mode. It works pretty good but not as well as I would have liked. I think the issue is my heavy Asymmetrical load it's trying to adjust for. I don't think the Kangaroo is good with auto Tuning these types of load. I had to do a bunch of tweaking to the auto tune settings before I was happy with them.
Tony, I hope you don't mind me tooting your horn here. However i was blown away when I watched this YouTube news cast about your work and how your known world wide and respected in your community at home. I think our friends here would really enjoy it also.
Did you make that Star Trek Transporter shown in this vid? I've had one sitting on the shelf in my office for a couple years now. You do Very cool work. I'm proud to know you! cool cool
cool cool
Dave, thanks for the kind words! the interview is quite old now, we have done quite a few more toy, game and gift products since, and are now just signing off our sixty-first licence (in fourteen years).
My favorite TV interview is with the BBC, this also explains how we inventors get paid in royalties. I get very nervous doing TV interviews as you can tell in the video, here it is.
tony
great video.is this cube still on sale?
for the nervous feeling ,go to optition .seeing and talking at the same time, cost alot oxigen.