



The base is made from a discarded toy car. One of those for a toddler to sit and drive in, with its own motor and battery. Cut in half, using the rear axle. Here was the initial idea, pink as i found it:

Adjusted the transmission to include a differential.

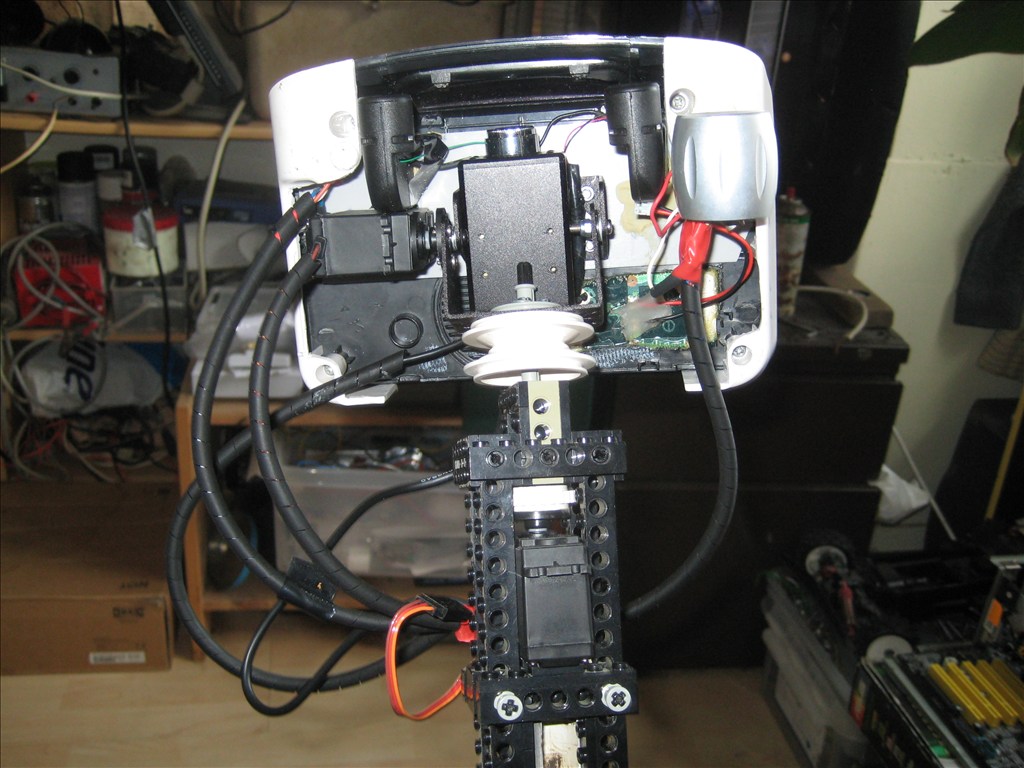
The steering wheel on a bearing, uses a servo to steer.

I am building this robot with whatever scrap parts and materials i can find, so i had to make do with this. But i will be upgrading to one motor for each wheel at some point for sure. For now i want to start focusing on programming, so i'm satisfied as it drives and steers.

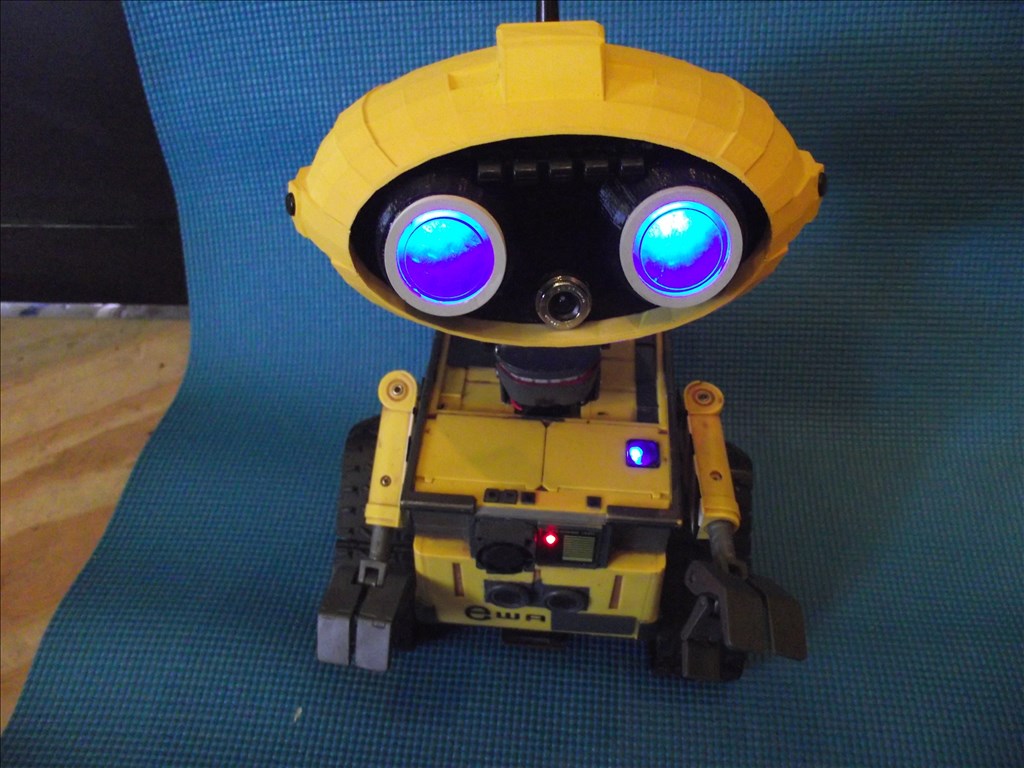
The head has got the camera, mic and some leds.

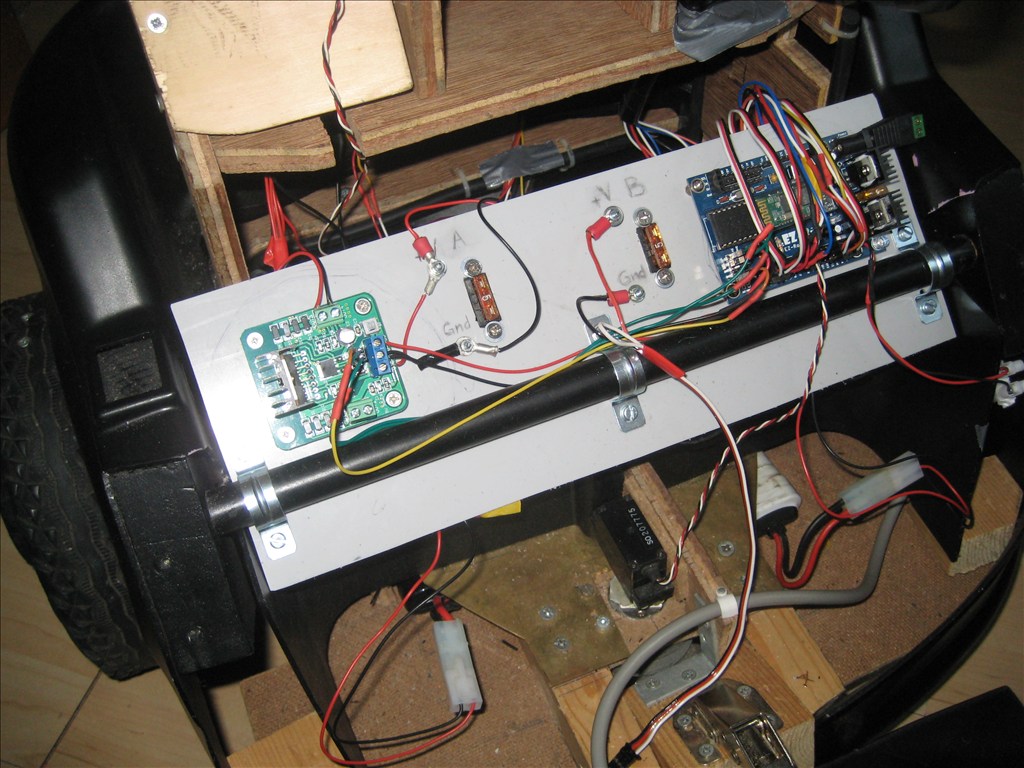
On the back are pc-fans, it opens to show the ez-b and h-bridge.


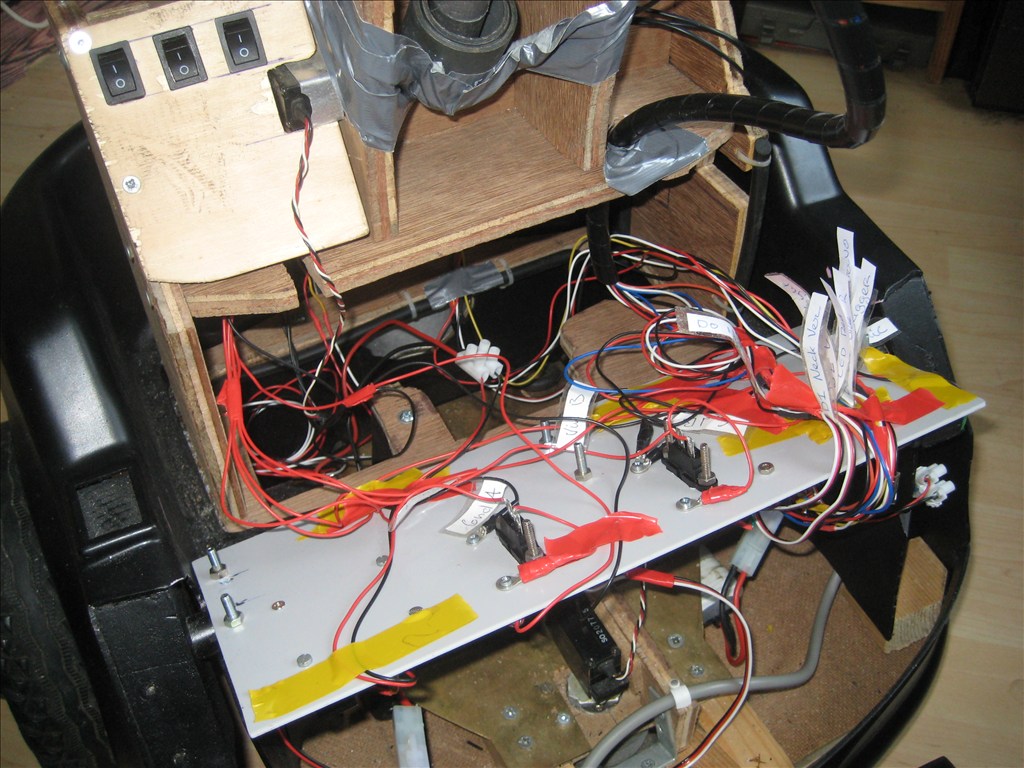
spaghetti
This will remain a work in progress for a long time no doubt. Anything could change and many things will. Everything still needs finishing. But the essential basics are there now. The motor and steering works, the neck servo's, distance sensor and camera all connected. Now i want to make this work autonomously and delve into programming.
I have a couple of questions too:
The pc-fans run fine when i connect them to any of the +5V ports. But the digital ports seem to have less power: i cant get them to turn with PWM or even just turn them on or off. Can the ez-b turn these fans on and of, or do i need a relais or something?
The headlight i can pwm, but i want to use the 7 to 8 Volt from the battery/Vin. Same question as with the fans.
I would like to read the battery power via the analog ports, using a voltage divider. First: Say i use two identical resistances, cutting voltage to half, but if the battery is charging at over 10V, what would happen? Bad? or will it just read maximum or something. Second: How to choose the resistance value, even after you know what fraction to use? Third: will this actually drain the battery? can you turn the analog port off or..?
There are some posts here about automatic self charging. Can you simply charge the batteries while they are being used? Is it simply a matter of connecting plus and minus to the charger when the ez-b is running?
some of the LEDs seem to peak at 45% pwm, just curious.
Discover more robots
Vgosine's Robotic Arm
Chris9's Jd's Adventures At Microsoft

How did I miss this one? It's awesome!
1 & 2, as Niek pointed out. Use a TIP transistor circuit.
I have also done a LiPo battery Monitor tutorial which could be modified to suit your voltage. The diode included (I think it's later in the post but not sure, I haven't read it for a while) will limit the voltage to the ADC to 5.1v in case of a problem with the divider. As Niek said, just use a calculator to work out the values of resistor needed and adjust the multiplier in the script I posted in the tutorial to suit the division used.
I charge mine while it's on, although it's in a low power state (camera off, lights off, LCD off, not moving, all servos released) and it charges albeit very slowly. If you can avoid charging while it's on then it's a good idea to do so. A changeover switch is a good idea - when I get around to building the charging station for mine I will include a change over switch that shuts off the battery to the EZB when on the base, I've not yet figured out how yet but it's planned...
Thank you Rich,
those are some great tutorials i will definitely have a closer look at. The changeover switch is a nice idea, but i guess it will not be able to turn itself back on