
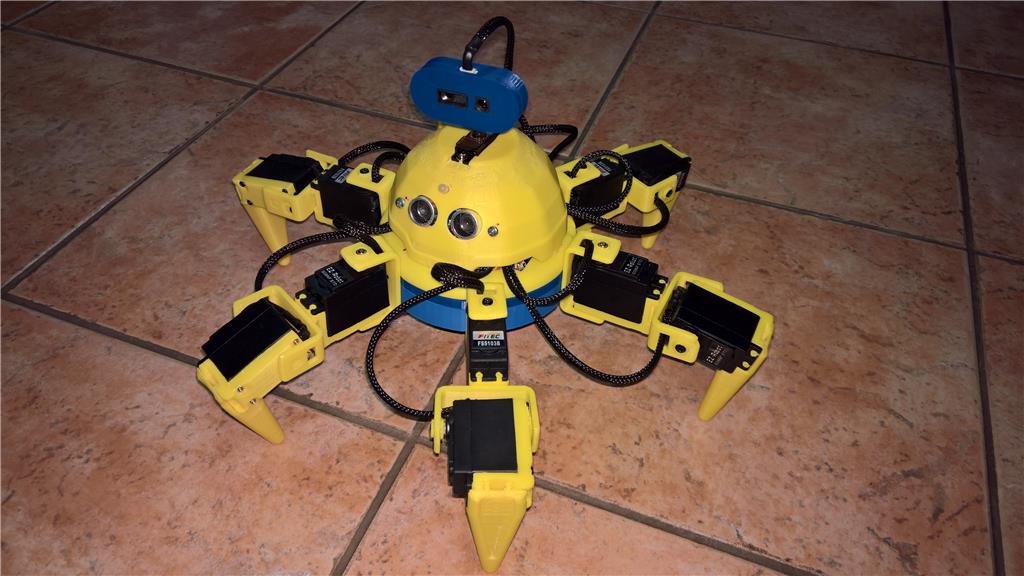
https://www.youtube.com/shorts/ws-IgqWD5tk My goal is to build a bigger humanoid on wheels. As i am not very experienced with ARC, i thought i can start with a smaller rolling robot. Add robot skills which i can use later. I decide to make the 3wheelbot based on adventure robot designed from ez-robot and ARC software. The 3wheel robot should be able to roll, has a camera, move forward,reverse, left and right. The camera uses only a tilt function. The 3wheelbot must avoid to touch he walls on the left,right sides as the chassis is quite wide. I installed 2 ultrasonic sensors.The bot is controlled remotely using remote UI and over internet as well.The IP address must be changed by using the wide IP for internet use. I modified the adventurebot by adding a bigger battery (6200 mHa), a mix chassis with aluminium and 3D pla. I added a third wheel on the rear . The camera is located on a 30cm high tower. I added an horn for the small speaker, this makes a good powerful sound.


Programming
There are some nice tutorials which helped me a lot. .I took the original adventure bot and modified the skills configuration.When you installed the adventure bot into ARC, you have automatically 2 workspaces. The 2nd workspace explained very well how to calibrate the 360 servos. Lucky i was to get this workspace since i did not know these servos must be calibrated before use. The servo d0,d1 for movement were already available. The challenge i had to face to was the configure the remote UI. It did not work at first. I did a lot of tries with wifi up down, ip address changes etc... You have to power off/on the robot sometimes, restart ARC.The remote UI apps on the smartphone is ok but sometimes, you cant get a connection and again have to power off/on the bot. The latency is quite high. That means the movement control is not easy to be controlled with the joystick pad.I will check with the exosphere skill .
Parts & Materials
Tools
- standard tools
- 3D printer with PLA matte. for the tower and 3rd wheel support
- Screws, dremel -2 component glue
Parts -iotiny
- camera ez-robot
- 2 x 360 hdd servos
- 1 servo 180 for camera tilt
- 2 ultrasonic sensor
- speaker with horn
- 7.4V battery lipo 6200 mAh
Discover more robots
DJ's Myo Gesture Tutorial
Nomad's Remix Inmoove Head

@jp15sil24
looking good . great start .
Looks like your have a good start and are having a lot of fun. Please keep us up to date on your progress!