
Asked
— Edited
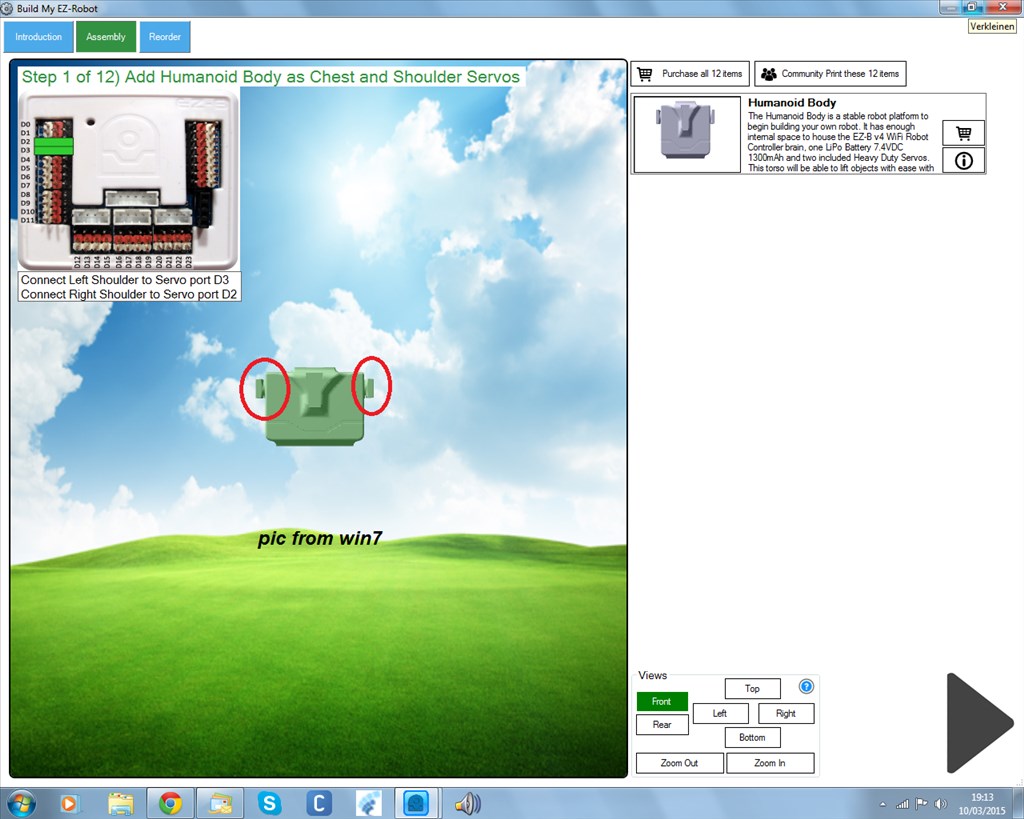
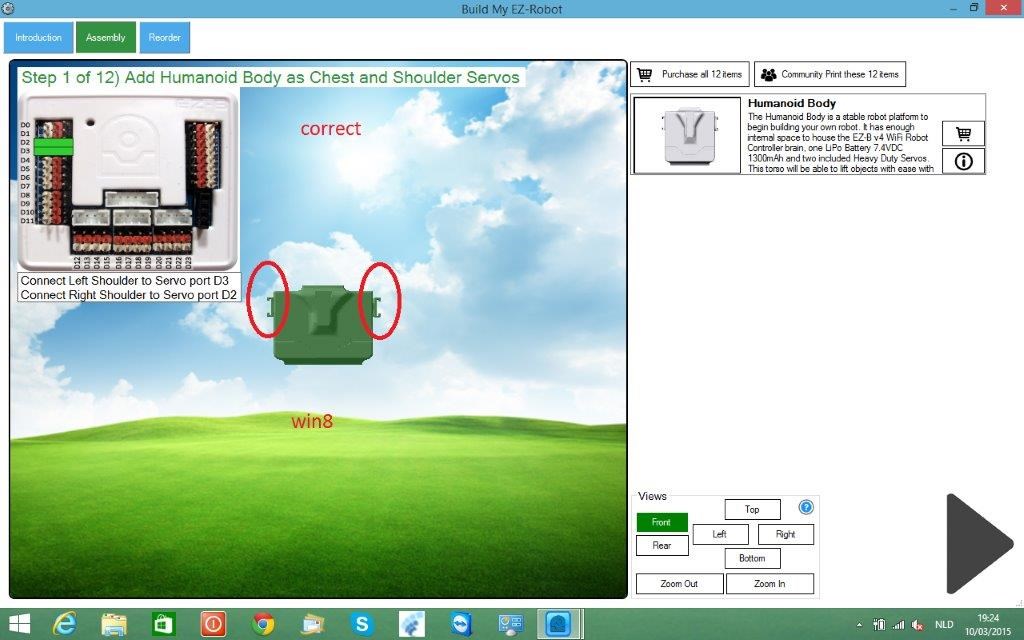
i found a bad pic in the learn section.if you follow this jd trows his arms backwarts. in win7 the assemble course is also the wrong pic. win8 is correct.
just finiched callibration off tree robots,all works perfect.
2x jd/1x roli

And you have the same version of ARC on both computers?
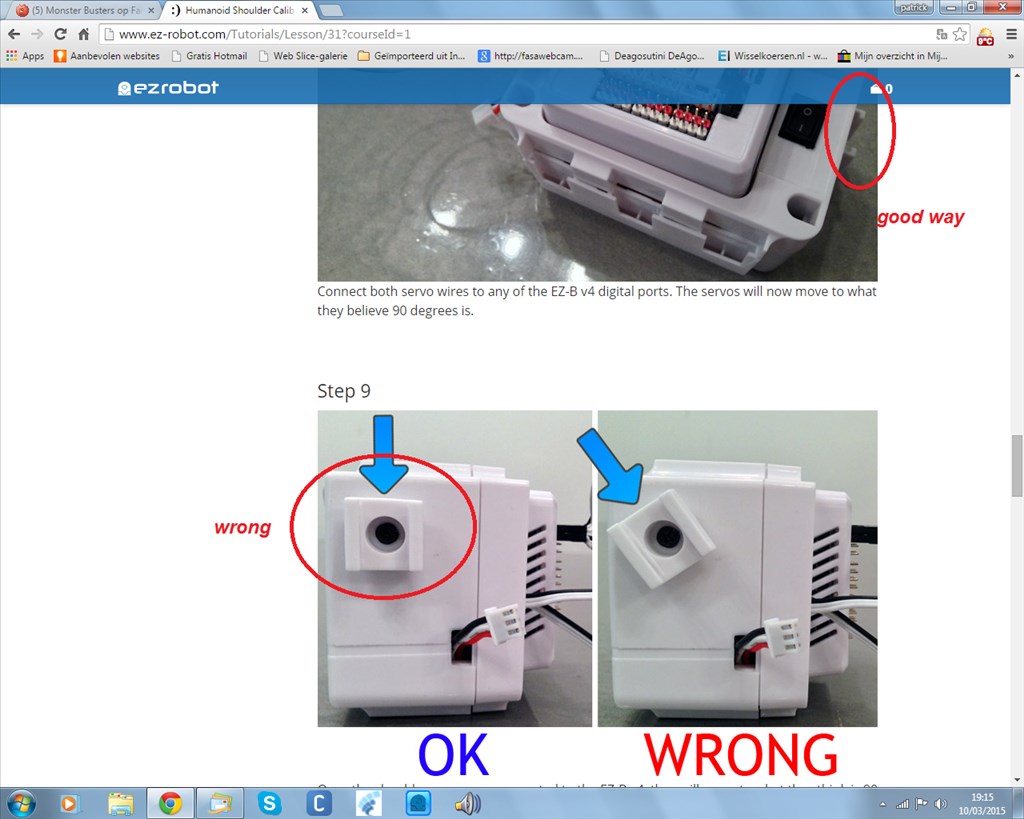
Either way, the EZ-Bit connectors do not only fit one way, they fit in 4 different ways. Set the servo to position 90 and then attach the arm as required, it will not throw it backwards. Provided the EZ-Bit connector is square (as shown saying ok) there will not be a problem.
hi rich
bolt pc has latest version.destop is win7/laptop is win8 these pics are made from these pc's.
See my edit, it's irrelevant if you follow calibration correctly and attach the arm correctly. The orientation of the EZ-Bit connector on the torso does not matter provided it's square and not offset to an angle when at position 90.
it does matter when you follow the tutorial and set the bit connector like in the pic. jd trows his arms backwarts and none off dj pose will work. but lets see what dj thinks off this topic. i did it twice today in win8 whit the good pic.best working jd's i had. all moves are perfect,very little noises only some 2 sec.
This is from my copy of ARC running in Windows 7.
Again, make sure you are running the same version of ARC on both computers. Operating system will not affect the images shown since there is only one download for Windows which covers Windows 7 and Windows 8. Also make sure you have sync'ed EZ-bits so that the same models are being used by the different PCs.
However, again, please read what I have written. You can connect an EZ-Bit to another EZ-Bit at either 90 degrees, 180 degrees, 270 degrees or 0 degrees. Provided the arm is positioned correctly it does not make a difference if the shoulder connector is at 90/270 degrees or 0/180 degrees.
Do I need to demonstrate this in a video for you to understand it?
How would that be possible if you have the same ARC version and the same identical project loaded both PCs?... What does it matter what version of windows if everything else is identical?
I just checked. My win 8 and win 7 have the same picture as @Rich just posted....
wow thats funny.how can that be?