Asked
What Is The Difference Between Pauselistening And Stoplistening
I have been using these two commands together, one following the other in my scripts. So far it has worked, but I really don't know the right way to use them.
controlCommand("Bing Speech Recognition", "StopListening")
controlCommand("Bing Speech Recognition", "PauseListening")
What is the difference in the two? Do I actually need to use both together each time to turn bing speech recog on and off? Where would one use one over the other? Is there a "best practices" for turning bing speech recog on and off while running a robot with aimlbot?
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skill (view all robot skills)

Bing Speech Recognition
by Microsoft
Accurate Bing cloud speech-to-text for ARC: wake-word, programmable control, $BingSpeech output, Windows language support, headset compatible

For additional details of the ControlCommand syntax, look at the bing manual page under the ControlCommand section. Click here and scroll down to the section where it shows each control command: https://synthiam.com/Support/Skills/Audio/Bing-Speech-Recognition?id=16209
However, the summary is...
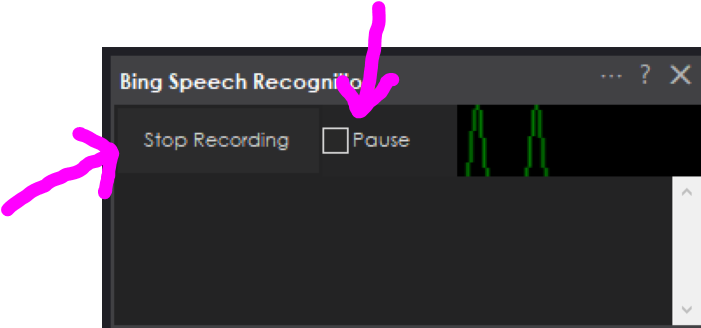
PauseListening pushes the pause checkbox. Pause checkbox is only visible when VAD is enabled
stopListening pushes the stop button. The stop button is only visible when it is recording.
*Note: I edited your question and selected the correct robot skill related to the question. The original robot skill you had selected was "Bing Text To Speech" and this is "Bing Speech Recognition". I also edited the text of your post to fix the examples, as both examples used "PauseListening", where you meant to have one as "StopListening".
Thank you DJ.
This helps.