smiller29
USA
Asked
USB Connection To EZB V4
OK guys I have another question for everyone can you use the UART on the EZB V4 to connect to a USB rather than the camera port?
I want to hardwire my EZB's to my onboard PC but I also want to use my ez-robot camera with one of my EZB V4.
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24

Lol, that’s what I meant. EX: I sent "U" and got back "UU". RX and TX were jumpered
K that would be a remote echo - even though there's no remote host but it's going through the wire. If Local Echo is checked in the terminal program, that means just display the character that were typed back to the user. Terminals used to need that option because back in the day different services/bbs may or may not echo the character back at you. So you'd have to turn it on or off in software... or you get douubbllee kkeeyy ssttrrookkeess!!
And you saw UU because the first U was yours, cause local echo was checked. The second U would have been from the wire.
Sorry man, I understand how it works I guess I used the wrong terminology.
Do you have the rts connected? Also - does the led flicker? I think it flickers with every packet or something. So if it's not flickering then it isn't sending. The camera won't send unless the rts is held low.
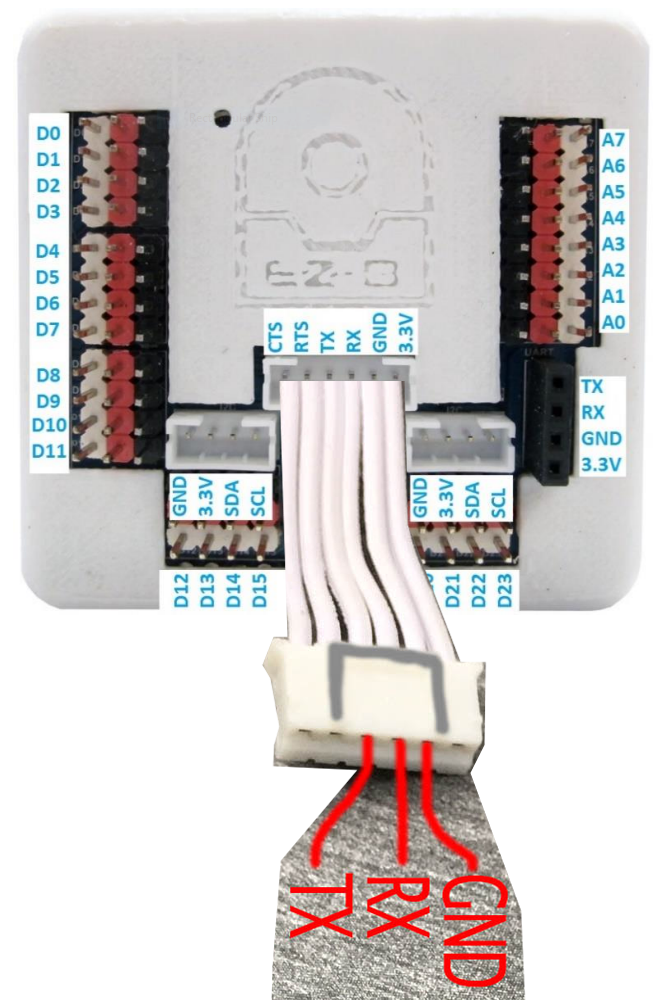
Yeah I held the camera side RTS low, and swapped TX/RX back and forth just to make sure I didn’t get it wrong. I also provided 3.3V and GND to the correct pins. I’ll look at it more tonight or tomorrow.
Hmmmm. Check with the camera on an ezb and see if the led blinks. That will let you know if you can see if it’s transmitting
Well, I am at a loss. I have tried the following but I can't seem to get the camera to communicate over the USB-TTL adapter:
Here are the two errors I get depending on which way TX/RX are connected:
@DJ any ideas?
The first msg implies that the tx and rx are wired correctly. But the message appears that it’s missing the header. So either
the baudrate isn’t supported and the data is unreadable and garbled
there’s too many missing because the converter can’t keep up so the packets and the header can’t be found. or there’s too much noise on the line. Although you’d think at least one header would be detected