
smiller29
USA
Asked
USB Connection To EZB V4
OK guys I have another question for everyone can you use the UART on the EZB V4 to connect to a USB rather than the camera port?
I want to hardwire my EZB's to my onboard PC but I also want to use my ez-robot camera with one of my EZB V4.
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24

Has to use the camera port because it’s the only one connected to the communication micro
you can hardwire the ezrobot camera to the pc with a usb to uart converter
Do you have more details on that wiring?
Wiring the camera? Same as wiring the ezb. Connect the rx to tx. The tx to rx. Power and gnd. Not sure about the rts and cts lines. I don’t think they need to be connected? Might wanna hit ezrobot up for that answer. But I know it can be done because I did it a few times a while ago. After all, it’s just a uart transmission
Wow, the ez-robot website is challenging to navigate. I had a hard time finding the USB instructions. I figured I'd share them because they're hard to find. They're in a section called "Robotic Courses," for some reason, LOL. And then, you select "DIY Robotics Kits." Here's the link: https://www.ez-robot.com/learn-robotics-serial-usb-connectivity-ezb-smart-robot-controller-and-iotiny.html
So the camera is the opposite of those instructions :)because you'd be doing the same thing with the camera as the EZB.
Thank you again I will pickup a 6 wire TTL just in case...
I looked at the EZ-Robot camera firmware (because I wrote it) - and I use the rts for the ezb v4, but it shouldn't be needed for the PC. This is because the ezb has limited ram for caching the video frames. The rts control the camera's data stream until it has flushed the frames to the TCP socket. The PC has gigabytes of memory vs. kb that I was working with on the ezb's micro. I see the RTS pin is enabled in the ARC camera code for COM ports, but I probably did that for failsafe because there's no way the PC buffer will fill up.
So yeah, you shouldn't need the rts on the pc - but it won't hurt if you use it.
DJ, I have tried the USB/TTL connected to the EZ-Robot Camera and I can't get it to work. If you can provide more help on this it would be appreciated. ARC see's the com port of the TTL but the camera does not work. If I connect it to the Iotiny the camera works.
I would like to get this sorted out so I can use it in my build. I really don't want to purchase another usb camera if I can help it.
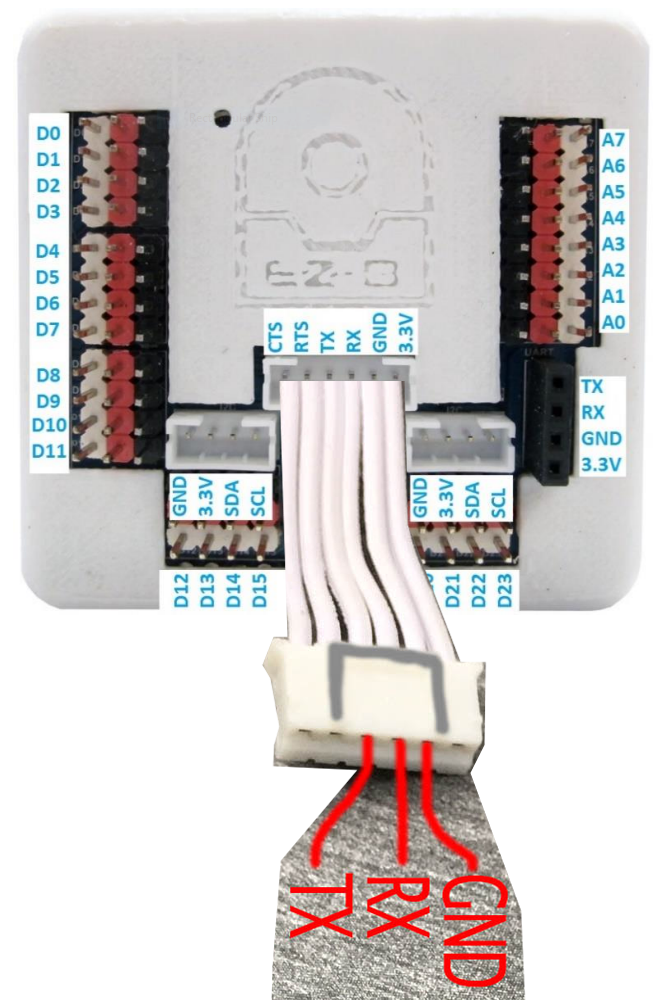
You don't need to purchase another camera. You can connect the USB UART like so...
USB UART CAMERA TX RX RX TX GND GND +3.3 +3.d
I don't think you need the camera's RTS connected, so hold the camera RTS to GND.
If you have more issues - ezrobot has excellent support on their Contact Us page. They'll be able to help you with their product.
Also, what do you mean by "arc sees the camera port"? Are you saying the camera device robot skill sees the com port? not the Connection control