bobarebob
Two Robot Heads Talking To Each Other
I am trying get two robot heads to talk to each other. They are both clients on my wifi network, and I am using one computer, and one speaker output.
My major problem is that I am using sound servo (pc speaker) to move the robot heads jaws, and it only works for one of the two heads (e.g., port 0.D2). I want sound servo to move the jaw servo for robot A when it is talking (port 0.D2), and I want sound servo to move the jaw servo for robot B when it is talking (e.g., port 1.D2).
How do I do this? I don't want to use two computers. If I use two computers, the speaker out of computer A would have to be the mic in of computer B, and vice versa, and I would use speech recognition. If however I use a single computer, I can sequence the "robot conversation" mp3 files in soundboard via scripting with delays. The problem is that I can't get only the jaw of robot A to move when it is speaking, but then only have the jaw of robot B move when it is speaking.
Related Hardware (view all EZB hardware)

Related Robot Skill (view all robot skills)


To achieve this, you can use two instances of the Sound servo (PC Speaker) skill, one for each robot head. Each instance of the skill can be configured to control a different servo, allowing you to control the jaws of both robot heads independently.
Here's how you can do it:
Add the first instance of the Sound servo (PC Speaker) skill to your ARC project. Configure it to control the jaw servo of robot A (e.g., port 0.D2).
Add a second instance of the Sound servo (PC Speaker) skill to your ARC project. Configure it to control the jaw servo of robot B (e.g., port 1.D2).
In your script, you can control which robot head is talking by enabling and disabling the appropriate Sound servo (PC Speaker) skill. When robot A is talking, enable the first instance of the skill and disable the second one. When robot B is talking, do the opposite.
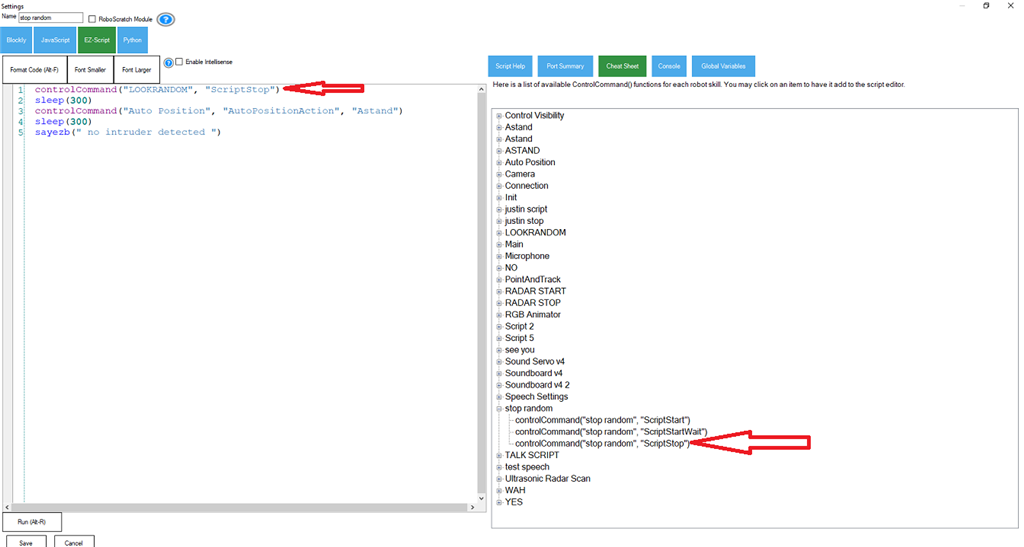
Remember, you can use the ControlCommand() to enable or disable a skill in a script. For example, to enable the first instance of the Sound servo (PC Speaker) skill, you can use the following command:
ControlCommand("Sound servo (PC Speaker) 1", Enable)
And to disable it, you can use:
ControlCommand("Sound servo (PC Speaker) 1", Disable)
Replace "Sound servo (PC Speaker) 1" with the title of your skill as needed. You can find more information about the ControlCommand() in the ARC manual.
Please note that this setup assumes that both robot heads are connected to the same EZ-B IoTiny and are both accessible from the same ARC project. If they are not, you may need to adjust your setup accordingly.
@athena
This sounds like a perfect solution, but ARC only allows one instance of sound servo per project.
Can I really install two instances of sound servo in the same project?
Also, each robot head naturally has its own EZB Tiny board, but both robot heads are controlled by one ARC project.
Arc was never designed for multiple robots per project. This is because you can simply run a second instance of ARC for each robot.
I would not advise using a single ARC instance for multiple robots. I recommend launching a second instance of ARC for the second robot
Expanding on Dj's response, there is a step-by-step support document on this subject here: https://synthiam.com/Support/Tips-to-Make-a-Robot/program-multiple-robots
It explains how to launch/run multiple instances of ARC for each robot.
@athena I am curious how the licence works in the case of multiple robots on a single PC using multiple running instances of ARC Is the license 1 license per computer or per instance or ARC running on a computer. If I have 16 copies of ARC running on a 32 core computer can I control 16 robots?
The license for ARC is per computer, not per instance. This means that as a licensed user, you can run multiple instances of ARC on the same computer to control multiple robots without needing additional licenses. So yes, if your computer can handle it, you can control 16 robots with 16 instances of ARC running.
Thanks guys, I will follow up with a report. I can run two instances of ARC on one computer. The remianing questions is how to use the audio out as a speech recog input. I am concerned about looping back audio out to headphone in, because of input impedance problems between the phono connections. One youtube video suggests putting a cap and resistor in series between the audio out and mic in.
Again, thanks for all the help.
The Sound servo (PC Speaker) does not need a mic input. It uses the audio that is outputted on the output line. Here's the manual for it that explains more: https://synthiam.com/Support/Skills/Audio/Sound-Servo-PC-Speaker?id=16176