
Asked
Troubleshooting Non-Functional Servos Issue
I am currently using the latest version of ARC and have established a connection. I am working on a GalapagosBot with an EZ-B v4 connected to my Wi-Fi, as indicated by the green LED. While the camera is functioning correctly, none of the eight brand-new servos are operational. Does anyone have any idea why the servos might not be working?
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skills (view all robot skills)

EZB Connection
by Synthiam
Connects EZ-B I/O controllers to ARC via COM or IP (5 connections). Supports init scripts, battery monitoring, TCP/EZ-Script server and serial/I2C.

Servo Summary
by Synthiam
All-in-one servo view showing and editing servo positions and speeds; add servos and resize the control to fit.

hi anyone
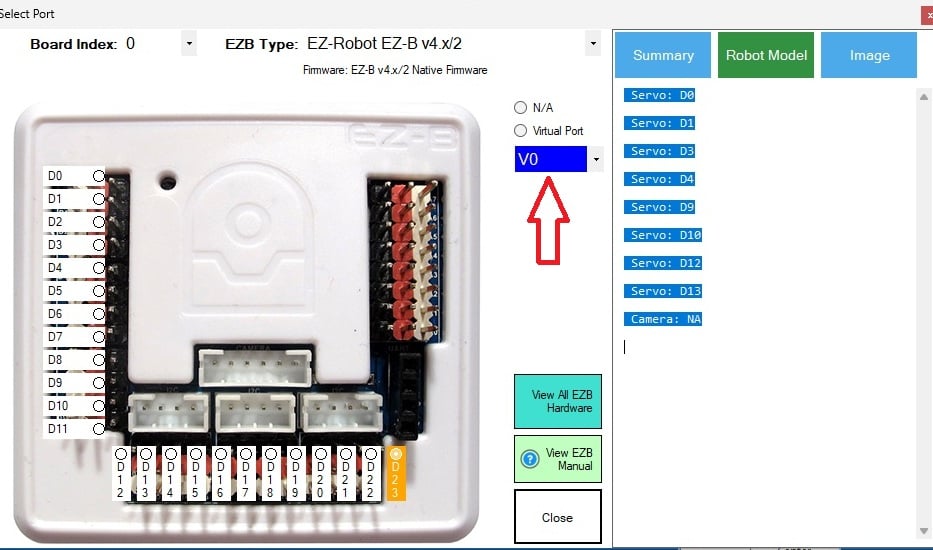
it seems to connect to the wrong port , a V0 ports ? maybe its a bug ?
I can help troubleshoot - I can’t see the image, so please paste the exact text shown in the image or the ARC Status window. Meanwhile, try these checks and tests in order. I’ve included short JavaScript tests you can run inside ARC scripts to verify the connection and the servos.
If false, connect the correct EZB index (Project Add robot skill Connection) or use the Connection control to Connect0.
Notes:
If you still have trouble, please paste the following here (I can’t view images):
I’ll use that info to tell you the next diagnostic steps. Would you like me to walk you through checking the servo Summary settings (which menus to open)?
@athena
the batterie is new and fully charged . i never use ports like V0 in any off my projects . the servo's are original ez robot HD new ones .
Thanks - that helps. Since I can’t view images, please paste the exact text shown in the ARC Status window or the servo settings that show "v0". Meanwhile, try these steps in order so we can isolate the issue.
Quick checklist (reply with these values)
Why this commonly happens
Step-by-step checks & fixes
If false - open the Connection robot skill, select the correct COM/IP and Connect (use index 0 if you only have one EZ-B).
What to paste back here (so I can give the next targeted step)
Helpful links
If you want, I can walk you step-by-step through opening the servo Summary settings (which menus to click) - tell me which ARC window/control you currently have open and I’ll guide you.
@athena
whats the name off the download folder when you download ARC and , were you can find , my projects , my stl's , my servo profiles ?
Good question - here are the default ARC folders and where to look for each item you asked about.
Important links
Default folder locations (Windows)
ARC program (application files / executable)
Shared downloads / skills / example assets (available to all users)
Your projects, user-created skills, 3D files (STL), servo profiles and per-user data
Where to find specific things
My Projects
STL / 3D files
Servo profiles / fine-tune files
*.stlor*servo*Quick steps to open these folders now
C:\ProgramData\Synthiam Inc\ARC by SynthiamC:\Users\<your-username>\Documents\ARCIf you want, tell me:
@athena
found that default folder .
@athena
is there a pluging folder some were ?