Asked
— Edited
This Is Not Correct
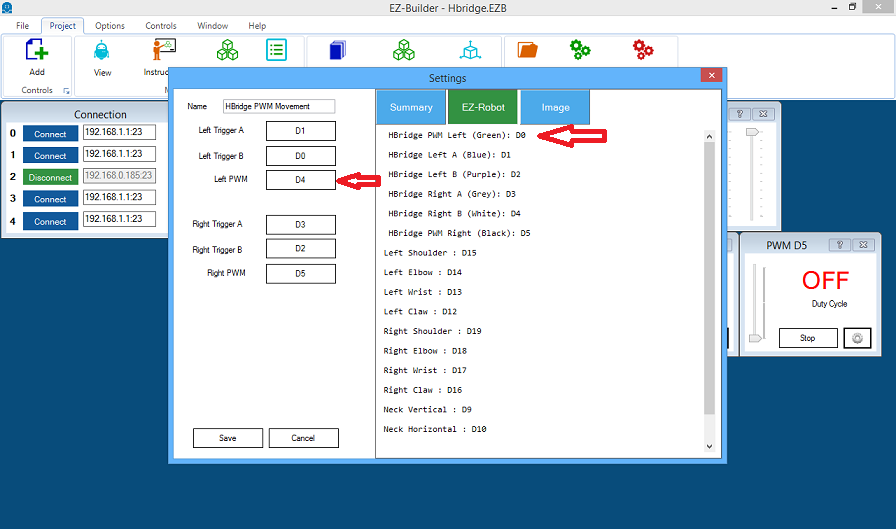
i am trying to use the hbridge.it only works on connection 0 and i need it to work on connection 2 then i saw this see pic.tutorial doesn seem correct .
 PWM Servo Feedback (ADC)
— Add ADC positional feedback to hobby PWM servos via minor mod to EZ-B/Arduino; enables real-time position readout, calibration and puppet mirroring
Try it →
PWM Servo Feedback (ADC)
— Add ADC positional feedback to hobby PWM servos via minor mod to EZ-B/Arduino; enables real-time position readout, calibration and puppet mirroring
Try it →
i am trying to use the hbridge.it only works on connection 0 and i need it to work on connection 2 then i saw this see pic.tutorial doesn seem correct .

@Nomad... Movement panels only work on board 0... Please read the tutorials carefully... Read the H-bridge Movement Panel tutorial again... movement panel
RR
thanks now i know what to try.ezbv4 second on connection 0 and the project on connection 2
the port is still wrong in the pic from tutorial. the project will also not work on connection 2 why do we have 4 connections if they dont work? only hbridge on connection 0 works thats all. sick
Again... All Movement Panels (including the H-bridge movement panel) only work on board 0 (connection 0).... I have 3 ezb4s in my inMoov project doing many, many different things other than just using movement panels... Having the ability to add many ezb's or ioTiny's to a project is one of the major things that make the ez robot platform so awesome... I am sorry you are having so much trouble understanding all this...
Edit the robot 3D design to change the ports in the reference list
You can still get a servo to move on a second (or third, fourth, fifth) connected EZB. You'll just have to write scripts with servo positions or use one or more AutoPisition controls. I'm running 4 EZB's in my B9 Robot, with motors and servos connected to all 4 and I don't have a single Movement Panel installed. Good luck and have fun
i understand what yourre saying.i try it. the hbridge dont work with the project together. because the first ezbv4 is full i took another one. when i set the hbridge on connection 0 ( only the hbridge it works ) and the mecanoid on excample connection 2 . it dont works.
I'm having trouble understanding your post. However It sounds like you're trying to use the wrong connection. If you only have two EZB's then the first one is connected to connection "0" and the second one should be connected to connection "1". If you're pointing to connection "2" in your scripts try changing that to a '1".
Hope this is what I'm understanding you to say and ti helps.
EDIT: I see in the picture in your first post that you are indeed using connection 2. Why is that when is sounds like you only have two EZBs?