
Dark Harvest
Some More Encoder
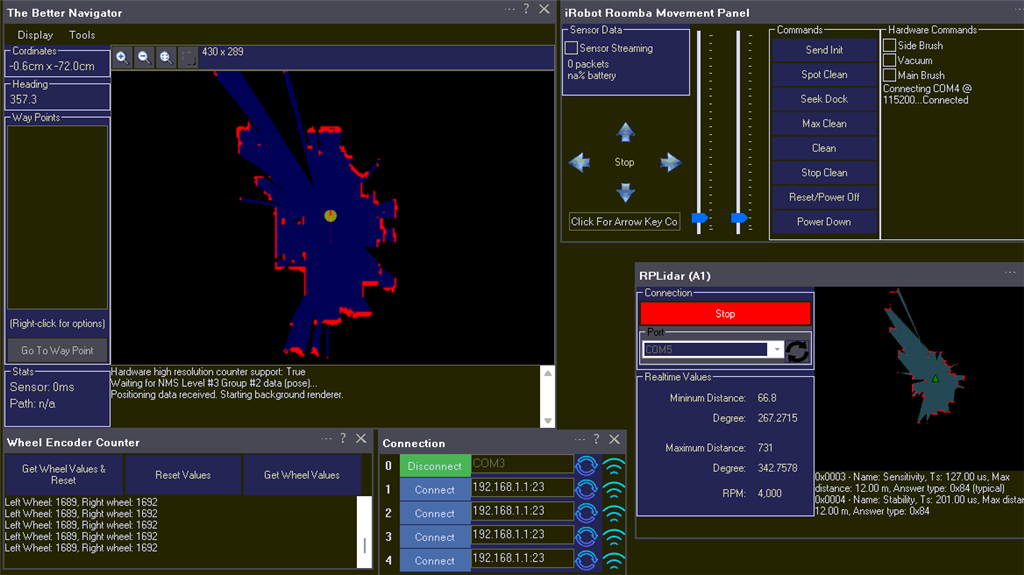
DJ hi, I am getting some weird map results in Better Navigator using the encoder counter skill. Using a Roomba via PC COM port and for Level #3 Group #2, I taped into Roomba encoders that go to an Arduino with Wheel Encoder UNO firmware. For Level #3 Group #1, I use a RPLidar. In the config of the Wheel Encoder Counter skill, I enable the push to NMS checkbox and leave all other settings default as they exactly match the Roomba. In The Better Navigator, I use External as pose hint source. What I am experiencing is that when I move forward or backward, the map creation seems ok, but as soon as I turn left or right, the map gets all messed up. The counts from the encoders are surprisingly good. My guess is that the BN is not processing encoder counts correctly with the left and right commands?
Related Hardware (view all EZB hardware)

Related Robot Skill (view all robot skills)


It sounds like you're experiencing issues with the mapping accuracy when using The Better Navigator with your Roomba and encoder setup. Let's go through some steps to troubleshoot and potentially resolve the issue:
Verify Encoder Configuration:
Check Encoder Wiring:
Review Wheel Encoder Counter Settings:
Pose Hint Source:
Lidar Configuration:
Test with Different Movement Speeds:
Check for Software Updates:
Debugging:
Consult the Manuals:
If you've gone through these steps and the issue persists, consider reaching out to Synthiam support for further assistance. They may be able to provide more specific guidance based on your setup. Additionally, you can explore the possibility of using a different pose hint source or adjusting the configuration settings to better suit your environment and hardware.
Thank You, @Athena, Tried all Pose Hint Sources but the result seems to be the same. In the first screen capture, I just go forward. In the second, I turn left, and the map goes berserk.
It seems like the issue might be related to how the encoder data is being interpreted during turns. Here are a few additional steps you can take to troubleshoot and potentially resolve the issue:
Calibration of Encoders:
Encoder Data Validation:
Review Arduino Firmware:
Check for Slippage:
Adjust Turning Speed:
Lidar Data Correlation:
Debugging Logs:
Cross-Check with Other Skills:
Consult Synthiam Support:
Alternative Mapping Skills:
By following these steps, you should be able to narrow down the cause of the issue and find a solution. If you have any more questions or need further assistance, feel free to ask!
@Athena,
One thing I noticed is that no matter if I move forward or backward the encoder counter skill counts always up to positive numbers. Shouldnt it be subtracting counts when moving backward?
Yes, you are correct. When moving backward, the encoder counts should typically decrease, resulting in negative values. If the encoder counter skill is only counting up, regardless of the direction, it could indicate a configuration issue. Here are some steps to address this:
Check Encoder Wiring:
Review Arduino Firmware:
Encoder Counter Skill Configuration:
Test with Simple Movements:
Debugging:
Consult the Encoder Manual:
Firmware Update:
Contact Support:
By addressing these points, you should be able to resolve the issue with the encoder counts not reflecting the correct direction. If you have any more questions or need further assistance, feel free to ask!
@Athena, Please take a look at the code from DJ's UNO Firmware with Wheel Encoder Counter; it only counts up. How would you proceed to modify the code to take into account all 4 movement directions?
To modify the code to account for all four movement directions, you'll need to implement a way to determine the direction of movement. Since the encoder only provides counts and not direction, you can use additional logic to infer direction based on the commands sent to the robot. Here's a general approach to modify the code:
Track Movement Direction:
Adjust Encoder Counts Based on Direction:
countLeft()andcountRight()functions to adjust the counts based on the current direction. For example, if the robot is moving backward, decrement the count instead of incrementing it.Here's a modified version of the code with these changes:
Additional Steps:
currentDirectionvariable based on the movement commands sent to the robot. This might involve modifying the communication protocol to include direction information.If you have any more questions or need further assistance, feel free to ask!