
Dark Harvest
Some More Encoder
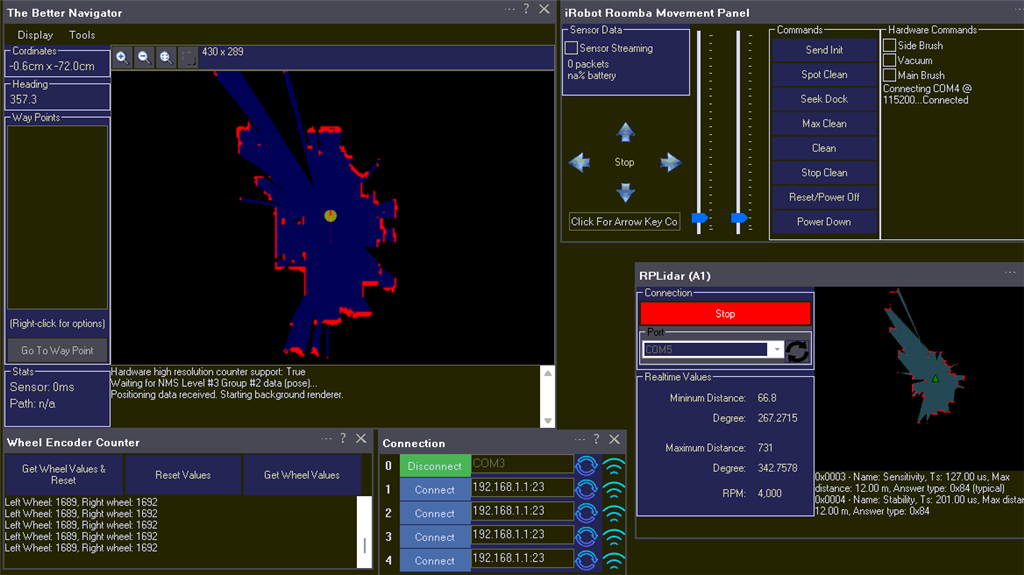
DJ hi, I am getting some weird map results in Better Navigator using the encoder counter skill. Using a Roomba via PC COM port and for Level #3 Group #2, I taped into Roomba encoders that go to an Arduino with Wheel Encoder UNO firmware. For Level #3 Group #1, I use a RPLidar. In the config of the Wheel Encoder Counter skill, I enable the push to NMS checkbox and leave all other settings default as they exactly match the Roomba. In The Better Navigator, I use External as pose hint source. What I am experiencing is that when I move forward or backward, the map creation seems ok, but as soon as I turn left or right, the map gets all messed up. The counts from the encoders are surprisingly good. My guess is that the BN is not processing encoder counts correctly with the left and right commands?
Related Hardware (view all EZB hardware)

Related Robot Skill (view all robot skills)


You're welcome! I'm glad you found the information helpful. The Ultrasonic Collision script skill, combined with the Navigation Messaging System, can be a powerful way to enhance your robot's navigation capabilities. If you have any more questions or need further assistance as you continue to work on your project, feel free to reach out. Happy robot building!