Asked
— Edited
Servos For Robot Dog
Anyone building a robot dog? I am looking for Servo's to build one that will work with ARC...
Related Hardware (view all EZB hardware)

EZ-B V4
by EZ-Robot
EZ-B v4/2 robot controller: dual Cortex ARM, Wi-Fi, audio/video, 24 servo/digital ports, I2C/UART, camera and Synthiam ARC control for custom robots
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skill (view all robot skills)

Servo Speed
by Synthiam
Adjust servo/PWM speed (0-20) between two positions to quickly experiment and tune motion; select board/port; settings aren't saved.

I got my motor in about two weeks even with the Chinese holiday. This is the eagle 8318 motor a lot of people are using for midsized and smaller dogs. Boy its quite heavy. Twelve of these will add a lot of weight to a dog. I'll do some testing with MJbots board this weekend. I am leaning toward a pully and belt to increase the torque and the ratio vs gearboxes.
Chinese holidays are over, as we can see in this picture too... Keep us updated on your progress!
Keep us updated on your progress!
I guess for a quad you will end up with a belt and pulley plus gearbox combo...at least that's what Josh is using for his dog! I really like those planetary reducers he is machining!
The motors I ordered are for a gripper, lets see if I can get it to work too!
I've been following this open source effort as well.
They have a website here. https://github.com/open-dynamic-robot-initiative/open_robot_actuator_hardware/blob/master/mechanics/actuator_module_v1/README.md#brushless-actuator-module-v1Here is their main page https://github.com/open-dynamic-robot-initiative/open_robot_actuator_hardware
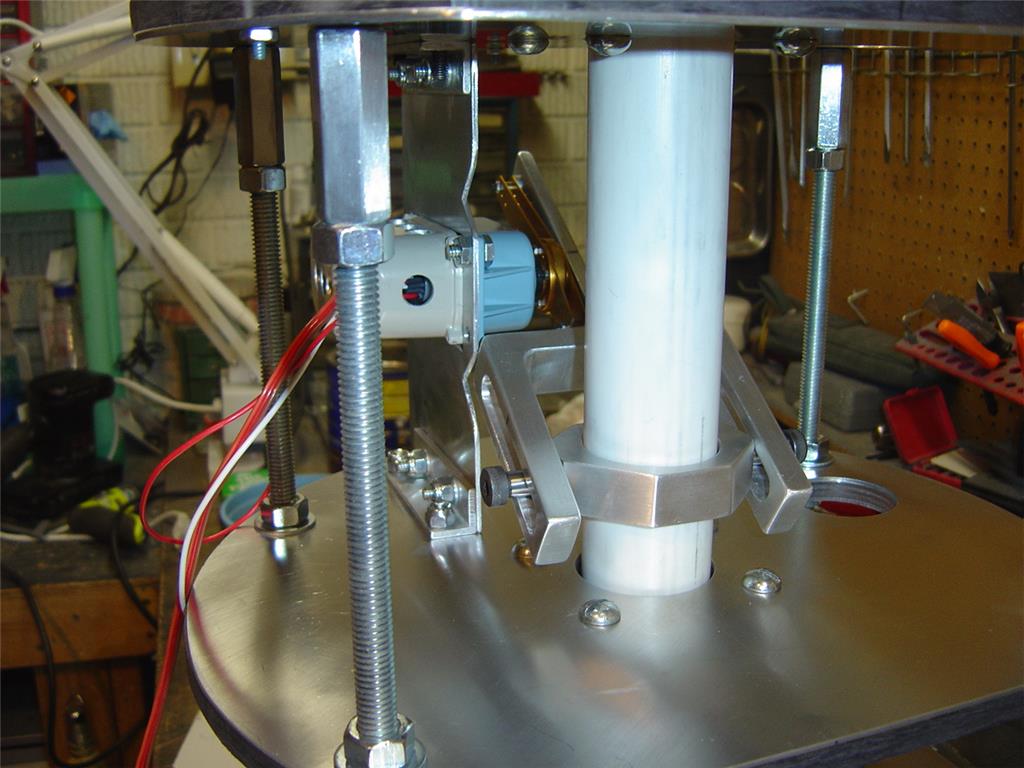
This is nearly identical to my designs. Double gearing should give a good ratio for speed and torque. I’m using skate board pulleys and belts. They are standard from the bearings to shaft sizes.
I like the idea of 3D printed with skateboard bearings and low cost BLDC. I wonder about the custom timing belts, I have to imagine they could get pricey. There must be some common off the shelf timing belts that could be used.
I guess the robot arm would need 3 of these actuators, the base if mounted horizontally won’t have a lot of vertical torque so could base just use an ungeared BLDC? The wrist and gripper will only have to lift the weight of the load so I guess I could use common hobby servos.
I have decided to base my robot on the TJBOTS quad build as there is a strong community and lots of support, although the price for parts is steep, especially if you use Josh expensive motors. My logic was to use the supported JSON to communicate with the quad so I don’t have to fork the base design and use a payload adding an SBC to handle all the sensors, additional actuators as well as command and control with ARC.
I will need to make a robot arm and gripper for it, but I don’t think the dog can carry a heavy load so what ever I do needs to be light weight and easy to attach / remove. Hopefully I can use USBCANBUS to drive the robot arm with the added SBC and ARC
@nink Here is one place I've been shopping. Very affordable. Here are kits and here for different sized timing belts up to 430 mm's. A google search will pull up a ton of belts and pulleys in regards to powered skateboards. Way more affordable than a gearboxes, but you need more space for this kind of a setup.
Very nice!! Good finds guys!! Looking forward to see where this is heading!!
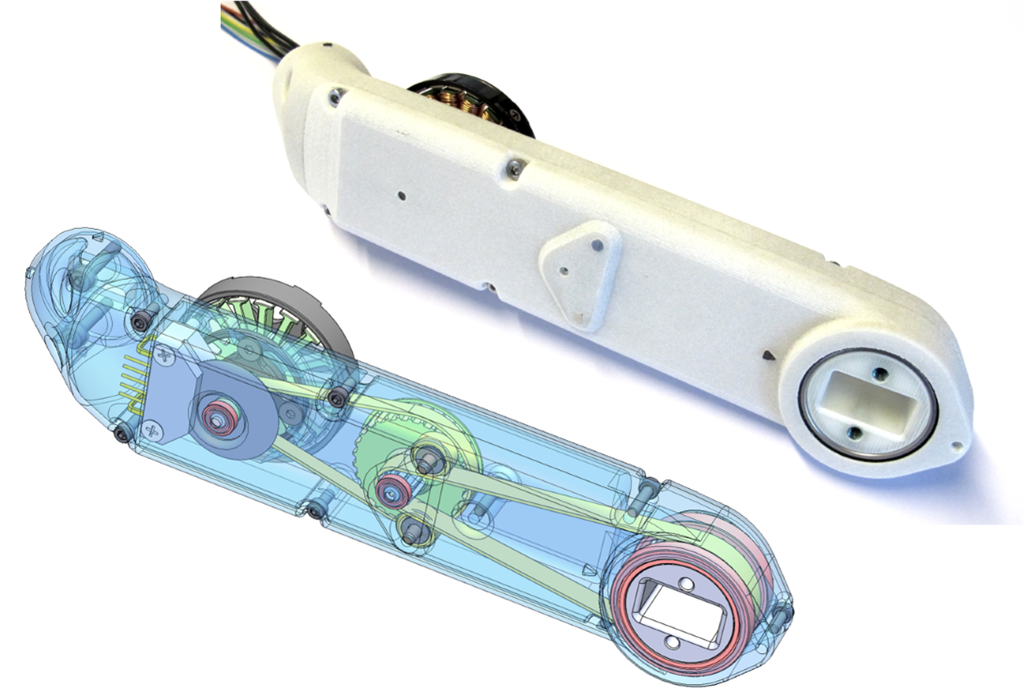
I am about to finish the design for my end actuator...it will be driven by 3 small Gimbal BLDCs, hope I can get it all to work soon!
Will throw it to the printer now!!
Love this design...so slim!