
My first attempt to use JD and an old roomba 530 at the same time, JD acting as a pilot, using his feet on the "brakes and throttle", moving a joystick around and displaying turn, backup and brake signals with his leds.
First step,go through all the roomba tutorials here, perfect to learn the pinout on the roomba side.
Turns out that in order to use JD as a pilot, I need to go another way, the main tutorial being about using only the microcontroller on the Roomba.
I finally decided to use UART port 0 to send commands to the Roomba, using Richard R's Roomba 500 custom movement panel2 (thanks)
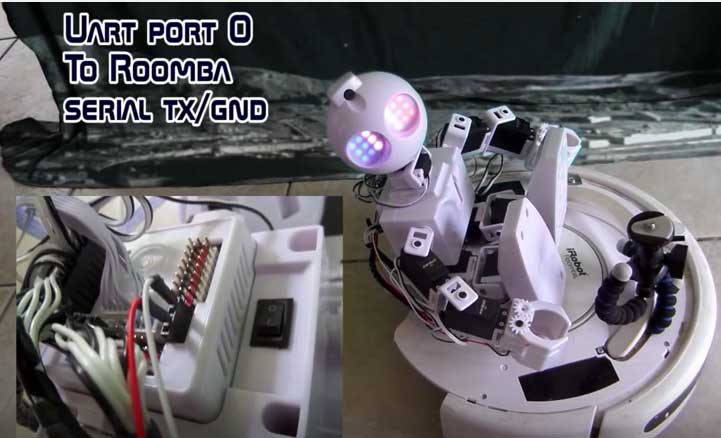
I simply changed the port to 0 (in Richard's panel it's set to port 1) so that makes the roomba respond to keyboard, joystick or voice inputs.
Now for JD ( known around our house as Joe  )
JD is positioned on top of his "vehicle" with a movable joystick made out of a Gopro flexible stand (and I could still add the gopro to it !) and holding on to a metal bracket I added on the opposite side.
)
JD is positioned on top of his "vehicle" with a movable joystick made out of a Gopro flexible stand (and I could still add the gopro to it !) and holding on to a metal bracket I added on the opposite side.
I created some moves for JD, hands, feet, head and led signals, so he could "drive", then merged my project with Richard's panel...
WRONG, roomba would drive off, but JD would try to walk, not execute my clever driver moves !
Answer was somewhere in the forum by DJ, remove JD original movement panel, install a custom panel, import my "driver" moves and voila, it works perfectly. 
I will add more features to that combo in the future, sound, tracking..the possibilities seem endless... Great job by DJ and his team, not only on designing the robot and the great software, but on creating the community and learning resources...Tremendous help indeed.

Ha, ha, you beat me to it. I was building one with my iRobot Create to drive JD around....I love it that you have JD using his feet for clutch and throttle....
Well Richard without your Movement Panel I'd still be scratching my head so thanks again ! I'd love to see what you'll come up with
Hah! the video was cool. Loved the Space:1999 theme
Spooky67 that is a really cool merging of a Roomba and JD. Great video also!
Great idea , the presentation is also very seller. congratulations
Love the idea and the video! I guess the next step would be having JD actually drive the roomba via a JD sized working joystick. Or maybe two, one for each claw. Both forward for forward movement. Both backwards for reverse movement. one backwards and one forward for left and right. Only need to control JD then, assuming the joysticks would be wired directly (or indirectly through relays) to the actual motors of the roomba.
Thanks all for the kind words and suggestions. I have uploaded the file to the EZ-Cloud if anyone wishes to tinker with it .
Yes! I loved this! I never realized how well JD fits into the Space 1999 theme. He's a natural looking Eagle pilot. Nicely done video and very entertaining. I had a smile on my face the whole time.
Great work on the interface with the Roomba, EZB and camera. Keep stuff like this coming! Your obviously very talented and have a good imagination. A valuable combination.