TheRat
France
Asked
— Edited
Roli H-Bridge Question Too
Hi,
I have a probleme with my Roli h-bridge.
I checked my connections like explained in those posts : https://synthiam.com/Tutorials/Lesson/44 https://synthiam.com/Community/Questions/6809&page=2
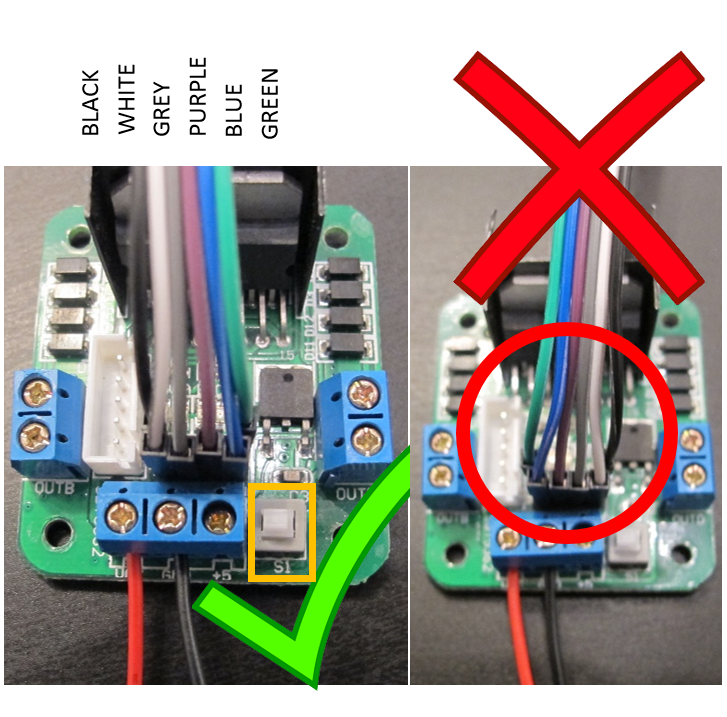
My h-bridge was initially connected like the wrong way as here :

Now when I open the exemple project from roli in ARC , if I want to go forward, only the right motor is going forward (nok), if I want to go right, only right motor is going backward (nok), if I want to go backward, the two motors are going backward (ok), if I want go left, left motor is going backard, right motor is going forward (ok).
I don't know where is my mistake.
Thanks

Have you checked the wiring on the ezb side to see if it is correct as well?
@TheRat.
Just a thought. Have you changed the digital port values in the "H-Bridge movement" control config menu (pictured below)? Try clicking on the "gear" icon, then try changing the port values in menu until you get the correct movement direction you desire.
TheRat, did you modify the project? Always use the default projects that are included with ARC. The default projects always work and are tested.
Ensure both the wires on the EZ-B and wires on the HBridge are connected correctly according to the images.
I realize the image is very challenging to understand, which is why we will be changing it when i return to Calgary later this week.
@Richard : I have same the same wiring on ezb than in tutorial.
@Steve : I have this :
@DJ : Thanks, I modified the project but "save as" it localy, I have reloaded the roli default project and I have the same problem.
it looks ok to me but I certainly miss a trick of
Your black PWM pin looks like it isn't plugged in all the way on the H-Bridge, but that would effect the right motor and your issue is with the left motor.
Do the leds on the h-bridge light when you give it commands?
Alan
Trial and error my be your friend here. The only thing I can suggest you could do for now is change the trigger configuration around until you find one that works for you. No need to change PWM values. Do one channel, left or right, at a time to make elimination easier.
Follow up to Steve G's suggestion. When my Roli was wired backwards, I added a digital on object for ports 0-5 and then used the chart from Rich's excellent H-bridge tutorial amd tried different combinations until I figured out the wiring.
Looking at your pictures and symptoms, I think you have a bad Hbridge, but that would confirm it. If you set d0 and d6 high, and then find any other port which doesn't cause some movement then you either have a bad H-bridge or a bad port on the EZ-B.
(you can test for a bad port by moving the wire from the non-responding port to another port.)
Alan
It looks like your left forwards wire isn't working or isn't in the right place going by the description of what's happening/not happening.
Using the defaults, this should be port D1/blue/In4.
Never count out a broken wire, that's been the culprit a number of times for me. Try swapping over the purple and blue wires on both sides so that purple connects In4 to D1 and Blue connects In3 to D0, test and see if the left motor runs only reverse rather than only forward, if this is the case then the blue wire is broken.
A, B, C and D should light up too depending on the logic sent. Forwards, reverse, left and right should make 2 of the 4 leds illuminate, does it? (this will eliminate a motor/motor wiring fault).